Нерегулируемый перекресток: ПДД. Проезд нерегулируемых перекрестков
Водителю, проезжая регулируемое пересечение дорог, достаточно исполнять распоряжения светофора или сотрудника ГАИ. В принципе, это довольно просто. Двигаться по нерегулируемому перекрестку гораздо сложнее.
Что представляет собой такая развязка
Приближаясь к пересечению дорог, следует обратить внимание, чем упорядочивается очередность проезда транспорта. Регулируемые и нерегулируемые перекрестки имеют одно главное отличие — наличие либо отсутствие светофора и регулировщика. Присутствие последних говорит о регулируемом пересечении, а отсутствие свидетельствует о том, что вы находитесь, наоборот, на нерегулируемом пересечении дорог.
Знаки
Дорожные знаки помогут человеку за рулем транспортного средства понять, какое пересечение проезжих частей перед ним и как правильно поступить. Так, на нерегулируемом перекрестке устанавливаются — «Уступить дорогу», «Главная дорога», «Автомагистраль», «Конец автомагистрали», «Пересечение со второстепенной дорогой», «Примыкание второстепенной дороги» и прочие.
Проехать правильно и без дорожно-транспортных происшествий вы сможете, лишь умея читать знаки.
Проезд нерегулируемых перекрестков: правила
Прежде чем начать движение на нерегулируемом перекрестке, обязательно нужно изучить все установленные знаки. А затем, приняв их во внимание, начать перемещаться, учитывая правила. Нерегулируемый перекресток не вызовет у вас сложностей, если вы умеете читать знаки и помните ПДД.
Безрельсовые транспортные средства не имеют преимуществ перед трамваем, независимо от направления движения и статуса проезжей части, на которой находятся. Поэтому автомобили всегда пропускают их, и только после этого начинают движение согласно установленным дорожным знакам.
Перед пересечением дорог имеется знак «Главная дорога»
Как уже неоднократно упоминалось, движение на нерегулируемых перекрестках зависит от установленных знаков. Поэтому, для того чтобы правильно проехать нерегулируемое пересечение дорог, следует знать, кого нужно пропустить, а где вы имеете преимущество.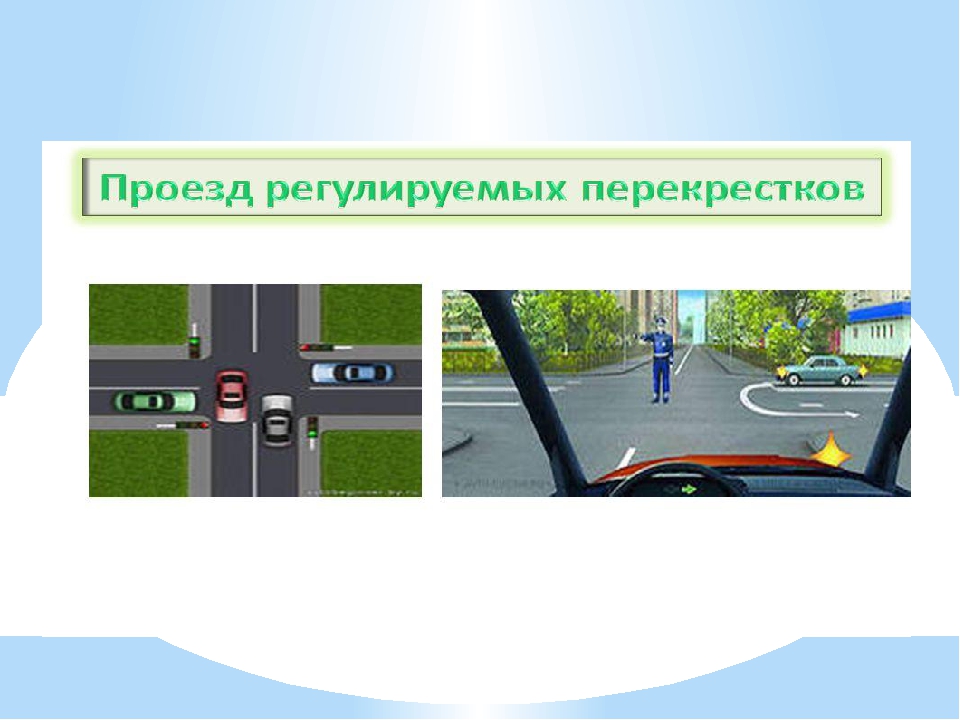 Существует несколько вариантов проезда нерегулируемого перекрестка.
Существует несколько вариантов проезда нерегулируемого перекрестка.
Все зависит от того, как расположены главная дорога и ваше местоположение относительно нее.
1. Если транспортное средство располагается на главной трассе и она продолжается прямо, то алгоритм движения вашего автомобиля следующий:
- При желании проехать в прямом направлении — уступать дорогу не должны никому.
- Планируете повернуть направо — также преимущество имеете вы. Соответственно, перекресток проезжаете первым.
- Поворот налево — в первую очередь пропускаете встречные автомобили, которые, так же как и вы, находятся на главной дороге. А именно вы должны приблизиться к середине перекрестка, выждать, пока они проедут, и только после этого продолжить двигаться. В случае если встречные транспортные средства сворачивают налево, вы одновременно разъезжаетесь правыми сторонами автомобилей.
- Если вы собираетесь развернуться, то последовательность действий такая же, как и при повороте налево.


2. Главная дорога поворачивает направо. Ваши действия:
- При движении прямо вспоминаете про помеху справа. Если там есть автомобиль, то пропускаете его, а затем начинаете проезжать перекресток.
- Поворот направо — это единственное направление, при котором вы имеете преимущество. Поэтому можно смело сворачивать, не уступая никому.
- При повороте налево вы пропускаете автомобили, которые находятся справа и двигаются по направлению прямо или налево. Если ваша помеха справа планирует свернуть направо, то вам разрешено двигаться одновременно, так как в данной ситуации вы не препятствуете её движению.
- Разворот. В данной ситуации работают те же правила, что и при повороте налево.
3. Главная дорога поворачивает налево. Ваши действия:
- При желании двигаться прямо у вас приоритет, поэтому вы проезжаете первым.
- При повороте направо имеете преимущество, поэтому, не уступая никому, выполняете маневр.
- Поворот налево происходит по тому же алгоритму, что и направо.
- При развороте следует уступить транспортным средствам двигающимся слева, согласно ПДД. Нерегулируемый перекресток они, так же как и вы, проезжают по главной дороге, а преимущество перед ними образуется за счет того, что они являются для вас помехой справа.

Перед пересечением дорог установлен знак «Уступи дорогу»
Согласно ПДД, если на вашей дороге установлен знак «Уступи дорогу», вы в первую очередь пропускаете автомобили, двигающиеся по главной дороге, а затем тех, кто для вас является помехой справа.
Остановка у пересечения дорог:
- Перед вами находится знак «Уступи дорогу». При желании повернуть направо вы пропускаете свою помеху справа (даже если она делает разворот), также пропускаете автомобиль слева в связи с тем, что он направляется по главной дороге. Однако если он поворачивает направо, вам разрешено начинать двигаться одновременно с ним. При проезде прямо преимущество перед вами имеют автомобили справа и слева, поэтому уступаете им проезжую часть. При повороте налево вы пропускаете всех. То же самое и при совершении разворота.
- Главная дорога располагается справа от вас. При повороте направо имеет приоритет встречный автомобиль. Также безрельсовое транспортное средство справа в случае разворота. Еще вы пропускаете их, если планируете продолжить движение прямо и свернуть влево. Перед разворотом придется уступить всем автомобилям с трех направлений.
- Главная дорога находится слева от вашего ТС. Перед поворотом направо вы обязаны уступить встречным и находящимся слева автомобилям, потому что они находятся на главной дороге, соответственно, имеют преимущество. Пропустив автомобили на главной проезжей части (слева, со встречного направления) и справа (помеха справа), вы имеете возможность пересечь нерегулируемый перекрёсток по направлению прямо. Также вы не имеете преимущества при повороте налево.
- Разворот на таком перекрестке лучше не выполнять, но если другого варианта нет, то начинать маневр разрешено, только пропустив транспортные средства с трех направлений.
 При повороте налево вы пропускаете всех. То же самое и при совершении разворота.
При повороте налево вы пропускаете всех. То же самое и при совершении разворота.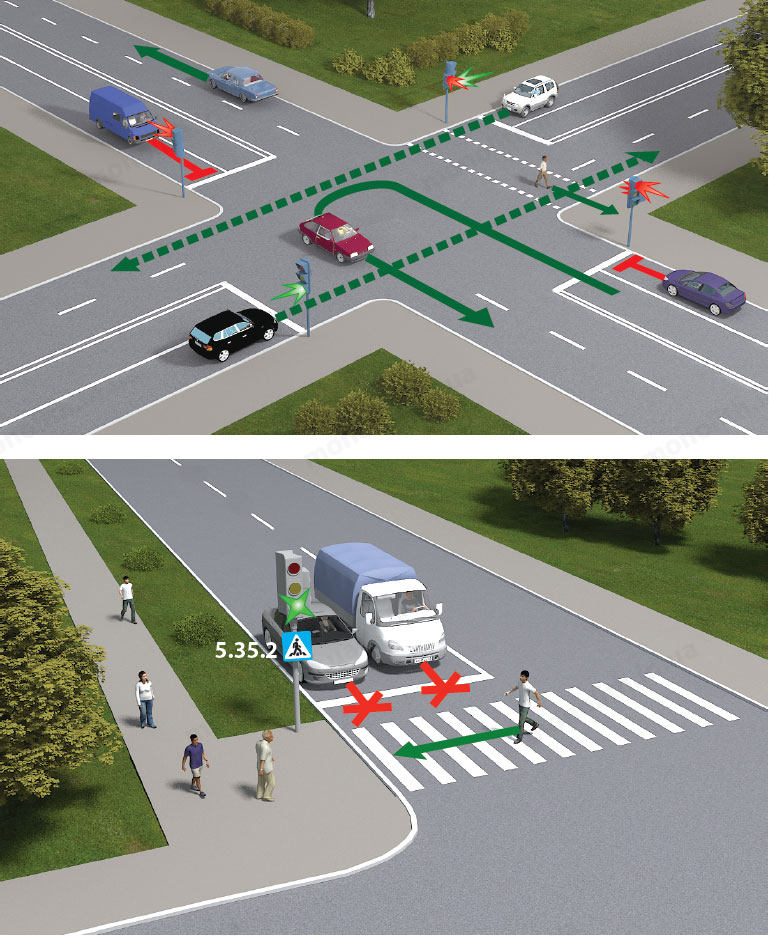
Проезд нерегулируемых равнозначных дорог
В ситуации, когда вам придется проехать пересечение равнозначных дорог, главное правило, которым вы обязаны руководствоваться, — это помеха справа.
Кого следует пропустить, зависит от того, куда вы направляетесь. Вы планируете:
- Повернуть направо. В этой ситуации вы не должны никому уступать, так как преимущество за вами, соответственно, ваш автомобиль проезжает первым.
- Ехать прямо. Если справа от вас находится транспортное средство, значит, вы пропускаете его, а затем проезжаете сами. Иногда получается так, что одновременно с четырех направлений автомобили планируют пересечь нерегулируемый перекресток равнозначных дорог прямо. ПДД не регламентируют данную ситуацию, поэтому водители должны между собой определить, кто из них начнет движение первым.
- Повернуть налево. В данных обстоятельствах для вас помехой справа является встречный и находящийся по правую сторону автомобиль. Исходя из этого, вы начинаете движение только после них.
- Совершить разворот. Для начала этого маневра вы обязаны пропустить ТС с трех направлений, и только после этого начинать движение.
Пешеход и нерегулируемый перекресток
Так как на перекрёстке отсутствует регулирование, то в ситуациях с пресечением перекрестка человеком необходимо быть очень внимательным. Ведь ему в случае ДТП максимум выпишут штраф, а для вас как водителя эта ситуация может обернуться лишением прав и даже тюремным сроком.
Пешеход на нерегулируемом перекрестке, двигаясь по зебре, имеет преимущество перед любым транспортным средством. Если же человек решил пересечь проезжую часть, на которой отсутствует пешеходный переход, вы не обязаны его пропускать. Но, как показывает практика, быстрее и проще уступить нерадивому пешеходу.
Советы начинающим
Обобщая правила, контролирующие проезд нерегулируемых перекрестков, можно выделить три основных пункта, которым нужно следовать:
- Помеха справа на пересечении равнозначных дорог. Обязательно необходимо следить, есть ли транспортные средства справа от вас.
- При установленном знаке «Уступи дорогу» первоначально водитель обращает внимание на того, кто едет по главной дороге, затем — на движущихся справа.
- Если на дороге, по которой вы двигаетесь, находится знак «Главная дорога», то вы внимательно следите за теми, кто направляется также по главной дороге и справа от вас.
 Обязательно необходимо следить, есть ли транспортные средства справа от вас.
Обязательно необходимо следить, есть ли транспортные средства справа от вас.Как проезжать регулируемые и нерегулируемые перекрестки по ПДД?
Существует достаточно много различных правил дорожного движения, наиболее важными можно назвать те, которые касаются проезда различных перекрестков.
При сближении транспортных средств возникают проблемы с очередностью проезда пересекающихся автодорог. Рассмотрим особенности определения перекрестков подробнее.
Понятие перекрестка
В ПДД есть понятие пункт 1.2, в котором указано определение данного термина. Если следовать точно трактовкам понятий при разбирательствах можно встретить довольно много нестыковок, на которые предпочитают сотрудники ГИБДД и судьи не обращать внимание.
Проблема заключается в самой законодательной базе, так как правил много, но никто не уделяет пристального внимания.
Рассматривая определение этого понятия можно выделить следующие моменты:
- Перекрестком называют пересечение дорог, но самой дорогой или ее частью он не является.
- Разнообразные статьи кодекса об административной ответственности при правонарушении содержат информацию об нарушении правил движения на дорогах, а не их пересечения.
- Перекрестком называют пересечение дорог на одном уровне. Поэтому различные мосты и эстакады не являются ими, и правила, касающиеся проезда перекрестка, не касаются их.
Точного определения границ данного элемента дорого также никто не дает, что является проблемой при определении правонарушения. На практике определить границы можно просто продолжив линии окончания дорожного покрытия, и места из пересечения являются границами.
Проблемы с определением границ могут возникнуть лишь в случаях, когда пересечение дорого происходит не под прямым углом, то есть в результате получается замысловатая форма. Принцип определения границ в этом случае схож с тем, что был приведен выше, только построения сложно.
Принцип определения границ в этом случае схож с тем, что был приведен выше, только построения сложно.
Когда нужно проводить определение границ? Примером можно назвать ситуацию, когда нарушение одного и того же правила дорожного движения на дороге и в месте их пересечения приводит к различной административной ответственности.
При этом так сложилось, что сотрудники ГИБДД стараются намеренно усугубить ситуацию в составляемом протоколе, что зачастую приводит к большим штрафам или еще дополнительным проблемам. Перекресток имеет четкие границы, и это следует учитывать.
Классификация перекрестков
Существует довольно большое количество признаков, по которым ведется классификация перекрестков. Примером можно назвать их деление на регулируемые и нерегулируемые, о чего говорится в пункте 13.3.
При рассмотрении данной классификации можно выделить следующие моменты:
- Регулируемыми называют те, на которых установлены постоянные или временные светофоры, и они обязательно должны работать на момент проезда.
- Нерегулируемыми называют все остальные перекрестки, которые не входят в предыдущую группу
.png)
При этом все типы рассматриваемого участка проезжей части можно разделить на группы с главной дорогой и с равнозначными пересекающимися проезжими частями. Кроме этого классификация проводится по форме, которая создается при пересечении дорог.
Круговые перекрестки
Наиболее сложный тип перекрестков, который можно отнести в отдельную группу. Круговой тип может иметь одну или несколько полос, движение по которым проходит с учетом правил движения по дороге с несколькими полосами.
Важным моментом является то, что при одновременном перестроении из полосы в полосу двух транспортных средств используется правило «помеха справа»: водитель, который находятся на левой полосе уступает дорогу тому, кто проводит перестроение с правой.
Довольно часто круговое движение считается главным, то есть перед перекрестком со всех дорог стоит знак «Уступи дорогу». Однако могут быть и другие случаи, важно уделять внимание при подъезде к круговому движению установленным знакам.
Т-образный тип
Довольно распространен, характеризуется тем, что к прямолинейной дороге подходит другая. Часто главной является дорогой, к которой примыкает другая, но не всегда. Очередность проезда устанавливается знаками, светофорами. Если он не регулируемый, действует правило «Помеха справа».
Не стоит также забывать о том, что дорога, имеющая более совершенное покрытие, к примеру, при сравнении асфальта с грунтовкой, считается главной.
Крестообразный перекресток
Схематически на знаках отображается то, как дороги пересекаются. Однако, к примеру, при крестообразном пересечении не всегда дороги будут расположены под углом, возможна и более сложная форма, но если находится в центре перекрестка, то направлений для движения будет 4.
Однако, к примеру, при крестообразном пересечении не всегда дороги будут расположены под углом, возможна и более сложная форма, но если находится в центре перекрестка, то направлений для движения будет 4.
Виды и ПДД на перекрестках
Проезд регулируемого перекрестка
Проезд проводится согласно указаниям регулировщика или сигналам установленного светофора. В случае со светофором все достаточно просто, когда нет дополнительных секций. Однако на пересечении нескольких дорог с большим количество полос можно встретить дополнительный секции, которые могут работать в разрез с основной.
В случае движения по дополнительным секциям учитывается сигнал основной, а также установленные знаки приоритета. Чаще всего встречается ситуация, когда стрелка зеленая, а основная секция красная – в этом случае движение по секции проводится с учетом возможного встречного движения.
Чаще всего встречается ситуация, когда стрелка зеленая, а основная секция красная – в этом случае движение по секции проводится с учетом возможного встречного движения.
В последнее время на сложных перекрестках устанавливают светофоры, на которых прорисованы стрелки движения для каждой полосы.
Проезд нерегулируемого перекрестка
Очередность проезда нерегулируемого пересечения дорог определяется с учетом установленных знаков приоритета, в случае их отсутствия правила «Помехи справа» или приоритета одного типа покрытия перед другими.
Следует уделять особое внимание правилам проезда нерегулируемых перекрестков, так как эта часть дороги несет с собой большую опасность.
Какая разница между перекрестком и прилежащей территорией?
Важным моментом назовем разницу между понятием перекрестка и выезда с прилежащей территории. С проблемой их определения встречаются не многие, но все же она есть. Разница заключается в следующих моментах:
- При въезде на прилежащую территорию начинают действовать другие правила движения.
- Все дороги по отношению к выездам являются главными и дают право на первоочередный проезд.
- Выезд не должен обозначаться, но сегодня подобные пересечения все же имеют знаки приоритета.

Выезд из прилежащей территории зачастую связан с заправками, магазинами, автостоянками, но на практике использовать этот способ определения очередности проезда пересечения дорог не нужно.
В заключение отметим, что помочь с определением очередности проезда перекрестка может и разметка. Для второстепенных дорог на границе наносятся треугольники, выезд из прилегающей территории обозначают прерывистой линией.
Поэтому в большинстве случаев определить очередность проезда можно практически сразу по причине наличия соответствующих знаков приоритета и нанесения нужной разметки.
Загрузка…Урок по ПДД «Регулируемые перекрёстки»
Тема: Регулируемые перекрёстки
Цель: знакомство с правилами перехода на регулируемом перекрёстке.
Задачи:
сформировать представления об опасных поворотах транспорта;
учить ориентироваться в опасных ситуациях;
отработка в игровой форме навыков безопасного поведения на перекрестке;
воспитывать наблюдательность, бдительность, осторожность, дисциплинированность.
Ход занятия
Ι. Организационный момент.
ΙΙ. Объяснение нового материала.
Повторение.
– Что такое перекресток?
Дети дают определение.
– Какие бывают перекрестки по форме?
– Определите форму перекрестка.
На доске рисунки различных перекрестков, дети определяют его форму.
– Какие виды перекрестков знаете еще?
– Что такое нерегулируемый перекресток?
2. Вступительное слово учителя.
Вы уже знаете, что место, где пересекаются улицы, называют перекрёстком. Перекрёстки бывают разные: четырёхсторонние, трёхсторонние, регулируемые и нерегулируемые.
Сегодня мы поговорим о регулируемых перекрёстках.
Регулируемые перекрёстки – это те, на которых очередность движения определяется сигналами светофора или регулировщика.
3.История светофора. Значение светофора.-А где вы видели светофор? (Ответы детей).
– В следующий раз, когда вы будете проходить по улице с мамой или папой, остановитесь и внимательно посмотрите, как слушаются светофора и машины, и люди.
Разных три имеет глаза,
Но откроет их не стазу:
Если глаз откроет красный –
Стоп! Идти нельзя, опасно!
Жёлтый глаз – погоди,
А зелёный – проходи!
— Первый светофор был установлен 10 декабря 1868 года в Лондоне возле здания Британского парламента. Его изобретатель — Джон Пик Найт — был специалистом по железнодорожным семафорам. Светофор управлялся вручную и имел две семафорные стрелки: поднятые горизонтально означали сигнал «стоп», а опущенные под углом в 45° — движение с осторожностью. В тёмное время суток использовался вращающийся газовый фонарь, с помощью которого подавались, соответственно, сигналы красного и зелёного цветов.
– Зачем нужен светофор? (Учитель объясняет значение каждого сигнала светофора для водителя и пешехода, демонстрируя трёхсекционный светофор с включенными сигналами).
К светофорному регулированию прибегают на перекрёстке, к которому за один час с разных направлений подходит более 600 транспортных средств.
По назначению светофоры делятся на транспортные и пешеходные. Дорожные светофоры служат для регулирования очередности пропуска транспортных средств и пешеходов.
Круглые сигналы светофора имеют следующие значения:
зелёный сигнал – разрешает движение;
зелёный мигающий сигнал – разрешает движение и информирует, что время его действия истекает и вскоре будет включен запрещающий сигнал;
жёлтый сигнал запрещает движение и предупреждает о предстоящей смене сигналов;
красный сигнал, в том числе мигающий запрещает движение;
сочетание красного и желтого сигналов светофора запрещает движение и информирует о предстоящем включении зеленого сигнала.

На некоторых перекрёстках с интенсивным движением пешеходов дополнительно к тротуарным светофорам устанавливают пешеходные светофоры со световыми сигналами. Если сигнал светофора выполнен в виде силуэта пешехода, то его действие распространяется только на пешеходов. При этом зелёный сигнал разрешает, а красный запрещает движение пешеходов.
Дети читают стихи.
Хоть у вас терпенья нет,
Подождите: красный свет!
Красный свет нам говорит
Стой! Опасно! Путь закрыт!
Жёлтый свет – предупрежденье:
Жди сигнала для движенья.
Объявляю вам заранее:
Перехода больше нет!
Не спешите,
Посмотрите, посмотрите на меня!
Не спешите,
Посмотрите до зелёного огня.
Зелёный свет открыл дорогу:
Переходить ребята могут.
Вот теперь идите смело –
Проходите, разрешаю,
Ни беда, что я один,
Я надёжно защищаю
От трамваев и машин.
4.Знакомство с сигналами регулировщика.
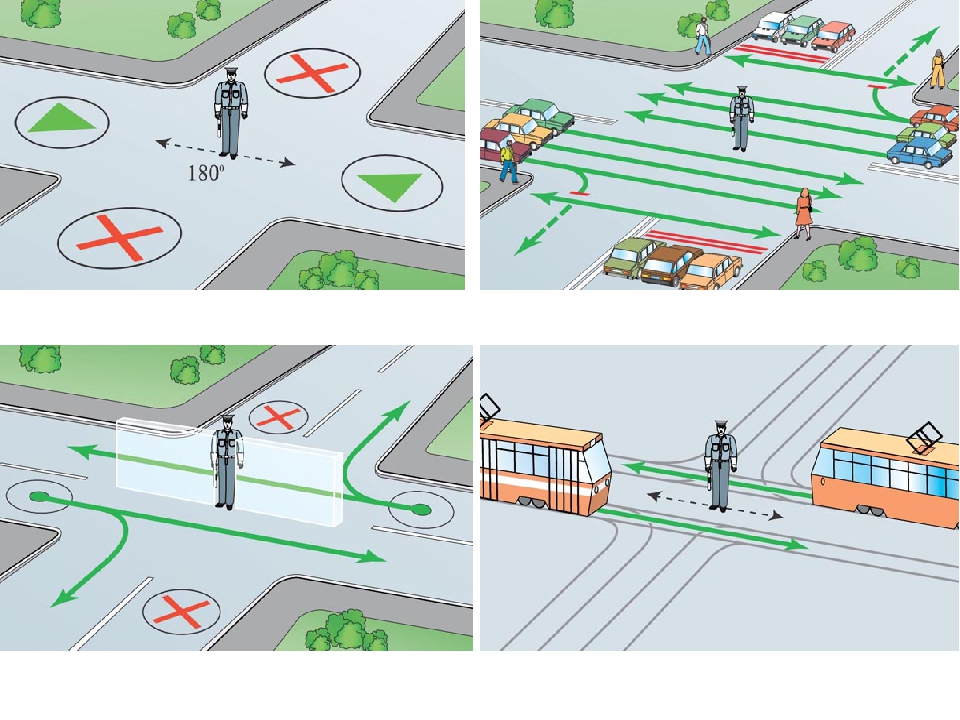
Сигналы регулировщика имеют следующие значения:
руки вытянуты в стороны или опущены: пешеходам разрешено переходить проезжую часть;
со стороны груди и спины движение всех транспортных средств и пешеходов запрещено;
правая рука вытянута вперед: пешеходам разрешено переходить проезжую часть за спиной регулировщика.
Регулировщик может подавать сигналами рук и другие сигналы, понятные пешеходам и водителям.
Дополнительный сигнал свистком подается для привлечения внимания участников движения. Регулировщик поднимает руку, и автомобили, находящиеся перед ним, останавливается -(этот жест соответствует желтому сигналу светофора). Во время этого жеста, пешеходам нельзя переходить улицу. Регулировщик поворачивается к ним и автомобилям боком, вытягивает руку и опускает ее (этот жест соответствует зеленому сигналу светофора). Автомобили движутся через перекресток. Переходят улицу и пешеходы. Но вот регулировщик поворачивается к ним спиной или грудью (соответствует красному сигналу светофора) пешеходы и транспортные средства останавливаются. Автомобили, стоящие на поперечной улице, трогаются и проезжают перед ним и сзади него. Через поперечную улицу проходят и пешеходы.
Переходят улицу и пешеходы. Но вот регулировщик поворачивается к ним спиной или грудью (соответствует красному сигналу светофора) пешеходы и транспортные средства останавливаются. Автомобили, стоящие на поперечной улице, трогаются и проезжают перед ним и сзади него. Через поперечную улицу проходят и пешеходы.
5. Викторина с мячом
Учитель кидает учащемуся мяч и задаёт вопрос. Ученик отвечает на вопрос и возвращает мяч учителю.
– Что надо делать, если загорелся жёлтый свет, а вы дошли только до середины улицы?
– Кому даёт команды пешеходный светофор?
– Для чего предназначен “островок безопасности”?
– Когда надо начинать переход улицы?
– Сколько сигналов у светофора?
– Можно ли переходить улицу на жёлтый сигнал светофора?
– Что означает красный сигнал?
– Каким машинам надо уступать дорогу даже тогда, когда для пешеходов горит зелёный свет?
– Назови игры, которые становятся очень опасными, если играть в них на улице, а не во дворе?
– Как называется пересечение дорог?
– Что следует сделать, прежде чем начать переходить улицу?
6. Игра “Светофор”
Игра “Светофор”
У учителя – 3 круга: красный, жёлтый, зелёный. Учитель показывает их учащимся по одному, учащиеся выполняют движения.
Зелёный – ходьба на месте.
Жёлтый – хлопки в ладоши.
Красный – приседание.
Кто ошибся – сел на место.
ΙΙΙ. Закрепление
Даже верное соблюдение указаний светофора или регулировщика не гарантирует безопасный переход. На перекрестке опасен поворот транспорта на зеленый сигнал светофора, который предназначен для водителей и пешеходов. Поэтому необходимо быть очень внимательным, надо знать правила перехода проезжей части, знаки светофора и регулировщика, знать правила поворота автомобилей и всегда помнить, что есть недисциплинированные водители, которые могут не пропустить пешехода и наехать на него.
– Сегодня мы с вами составим правила перехода перекрёстка.
– Какой перекресток удобнее и проще переходить? Почему?
Правила перехода регулируемого перекрестка.
На доске вывешивается рисунок регулируемого перекрестка. По нему объясняются действия и составляется алгоритм.
1. Остановиться на краю тротуара.
2. Посмотреть на светофор на противоположной стороне дороги.
3. Дождаться зеленого сигнала светофора.
4. Дождаться остановки всех машин.
5. Посмотреть налево, направо, затем снова налево.
6. Совершить переход, контролируя движение машин с обеих сторон.
7. Пропустить машины со спецсигналами.
Готовая инструкция вешается под рисунком.
IV. Итог урока
– О чем мы сегодня говорили на уроке?
– Чему вы научились на уроке?
– Пригодятся ли вам полученные знания? Как?
Конспект занятия по ПДД «Перекрёстки»
Муниципальное бюджетное образовательное учреждение дополнительного образования детей
«Дом детского творчества №1»
г. Иркутск
Иркутск
Конспект урока
«Перекрёстки»
Автор:
педагог дополнительного образования
Пуляевская Наталья Петровна
2016 год
Цель: дать понятие о перекрестках, их видах, сформировать четкое представление о том, как переходить регулируемые и нерегулируемые перекрестки. Дать понятие о вертикальной и горизонтальной разметке и ее назначении; научить пользоваться знаками и разметкой в различных дорожных ситуациях.
Интеллектуальная разминка
Как ты думаешь, что такое перекресток?
Приходится ли тебе переходить перекрестки по дороге в школу?
Новый материал
Перекресток – это пересечение, примыкание или разветвление дорог.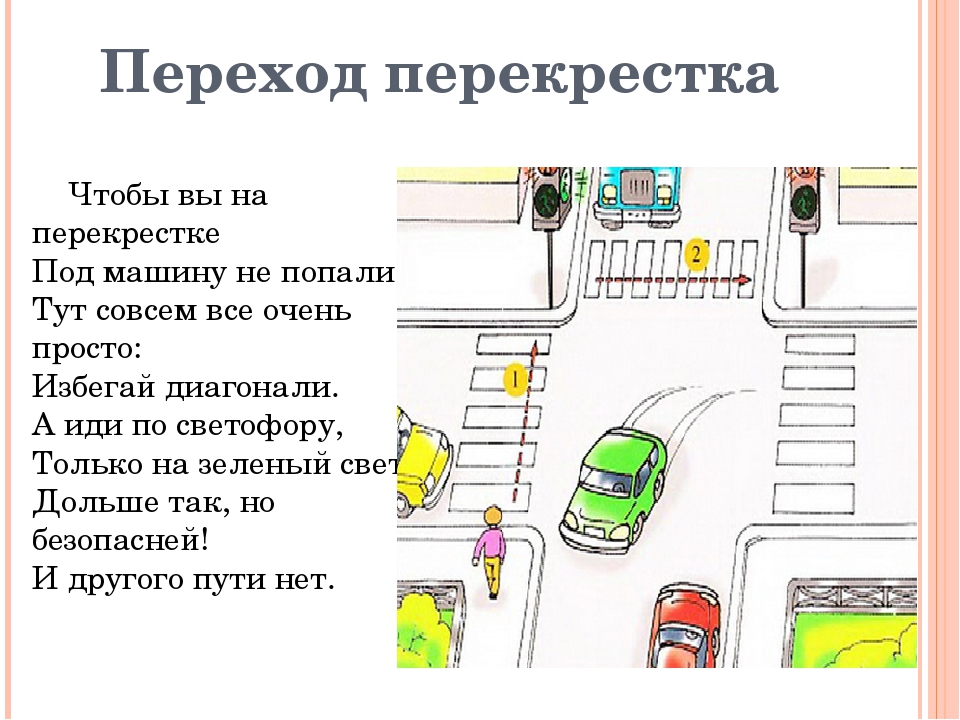 Выезды с прилегающих территорий (например, со двора) перекрестками не считаются.
Выезды с прилегающих территорий (например, со двора) перекрестками не считаются.
В зависимости от числа пересекающихся дорог различают следующие виды перекрестков:
ВИДЫ ПЕРЕКРЕСТКОВ
крестообразный
Т-образный
У-образный
С организацией кругового движения
Перекрестки, где пересекаются или берут начало несколько улиц, называются площадью. В нашем городе примером площади является сквер им. Кирова. Переходить площадь можно только в специально отведенных местах.
Часть улицы, расположенной между двумя перекрестками, называется кварталом.
Границами перекрестка являются воображаемые линии, соединяющие соответственно противоположные начала закруглений проезжей части.
Территория перекрестка — это место наиболее интенсивного движения транспортных средств и пешеходов, пересечение их путей.
Регулируемые – это те, на которых очередность движения определяется сигналами светофора или регулировщика.
В зависимости от интенсивности и плотности транспортных потоков, на перекрестках могут устанавливаться светофоры и знаки приоритета. Так при интенсивном движении в обоих направлениях целесообразно применение светофорной сигнализации. При этом транспортные потоки будут равномерно разгружаться с перекрестка в обоих направлениях. При значительно меньших потоках устанавливают знаки приоритета. При этом в направлениях, где поток автомобилей больше — устанавливают знаки главной дороги. Увидев перекресток без светофоров и знаков приоритета, можно заметить, что и поток транспортных средств незначительный по всем направлениям.
Под нерегулируемым пешеходным перехо
Обсуждаем ПДД с Юрием Красновым. На каких перекрестках можно обгонять и как?
 На каких перекрестках можно обгонять и как?
На каких перекрестках можно обгонять и как?
«Какие существуют правила (разрешения-запрещения) обгона на перекрестке по отношению к обгоняемому и обгоняющему? Например, на Т-образном перекрестке обгоняемое авто поворачивает налево, а в его левую сторону врезается обгоняющее«.
На вопрос отвечает Юрий Краснов, майор милиции, преподаватель Академии МВД РБ, с 1997-го по 2011 год сотрудник ГАИ |
С регулируемыми перекрестками все понятно (перекресток делают регулируемым наличие работающего светофора или регулировщика).
А вот с понятием обозначенного перекрестка водители путаются.
Обозначенным считается тот перекресток, перед которым водитель видит знак приоритета. Знак приоритета должен быть установлен на той дороге, по которой двигается водитель.
 Хотя перед этим перекрестком и могут быть установлены знаки «Уступить дорогу» или «Движение без остановки запрещено», но, поскольку они установлены на второстепенной дороге, то перекресток считается обозначенным только для тех водителей, которые подъезжают по второстепенной дороге. Для водителей, которые двигаются по главной дороге, перекресток считается не обозначенным.
Хотя перед этим перекрестком и могут быть установлены знаки «Уступить дорогу» или «Движение без остановки запрещено», но, поскольку они установлены на второстепенной дороге, то перекресток считается обозначенным только для тех водителей, которые подъезжают по второстепенной дороге. Для водителей, которые двигаются по главной дороге, перекресток считается не обозначенным.
Есть перекрестки, где можно визуально определить приоритет одной дороги по отношению к другой: выезд из дворовой территории или жилой зоны; грунтовая дорога подходит к гравийной; гравийная дорога подходит к дороге с усовершенствованным покрытием.
На не обозначенных перекрестках обгон разрешен.
В Правилах нет конкретного пункта с требованием уступить дорогу водителю, который выполняет обгон автомобиля, водитель которого собрался совершить разворот или поворот налево на не обозначенном перекрестке.
Но есть общее требование в пункте 56 главы 9 «Маневрирование»: перед выполнением маневра водитель обязан убедиться в том, что действия будут безопасны и не создадут препятствия для дорожного движения.

Еще есть пункт 95 главы 12 «Обгон, встречный разъезд», где упоминается про иные действия, которые запрещено выполнять водителю обгоняемого транспортного средства.
Таким образом, если водитель желает повернуть налево или развернуться на не обозначенном перекрестке, перед тем как выполнять запланированный маневр он обязан уступить дорогу водителям, которые по встречной полосе выполняют обгон.
ПДД РК раздел 13. ПРОЕЗД ПЕРЕКРЕСТКОВ
13.1. При повороте направо или налево водитель обязан уступить дорогу пешеходам, переходящим проезжую часть дороги по его направлению движения, на которую он поворачивает, велосипедистам, пересекающим ее по велосипедной дорожке, и маршрутным транспортным средствам, движущимся по полосе, обозначенной знаком 5.9 (с учетом пункта 18.2).13.2. Запрещается выезжать на перекресток или пересечение проезжих частей, если образовался затор, который вынудит водителя остановиться, создав препятствие для движения транспортных средств в поперечном направлении.
13.3. Запрещается опережение движущихся в попутном направлении транспортных средств, ограничивающих водителю обзор.
Если на перекрестке или перед ним остановилось транспортное средство, то водители других транспортных средств, движущихся по соседним полосам, могут продолжать движение лишь убедившись, что это будет безопасно.
13.4. Перекресток, где очередность движения определяется сигналами светофора или регулировщика, считается регулируемым.
При желтом мигающем сигнале, неработающих светофорах или отсутствии регулировщика перекресток считается нерегулируемым и водители обязаны руководствоваться правилами проезда нерегулируемых перекрестков и установленными на перекрестке знаками приоритета.
Регулируемые перекрестки
13.5. При повороте налево или развороте по разрешающему сигналу светофора водитель безрельсового транспортного средства обязан уступить дорогу транспортным средствам, движущимся со встречного направления прямо или направо, в том числе и въезжающих на перекресток в соответствии с пунктом 5. 6 Правил. Таким же правилом обязаны руководствоваться между собой водители трамваев.
6 Правил. Таким же правилом обязаны руководствоваться между собой водители трамваев.
13.6. При движении в направлении стрелки, включенной в дополнительной секции одновременно с желтым или красным сигналом светофора, водитель обязан уступить дорогу транспортным средствам, движущимся с других направлений.
13.7. Если сигналы светофора или регулировщика разрешают движение одновременно трамваю и безрельсовым транспортным средствам, то трамвай имеет преимущество независимо от направления его движения. Однако при движении в направлении стрелки, включенной в дополнительной секции одновременно с красным или желтым сигналом светофора трамвай должен уступить дорогу транспортным средствам, движущимся с других направлений.
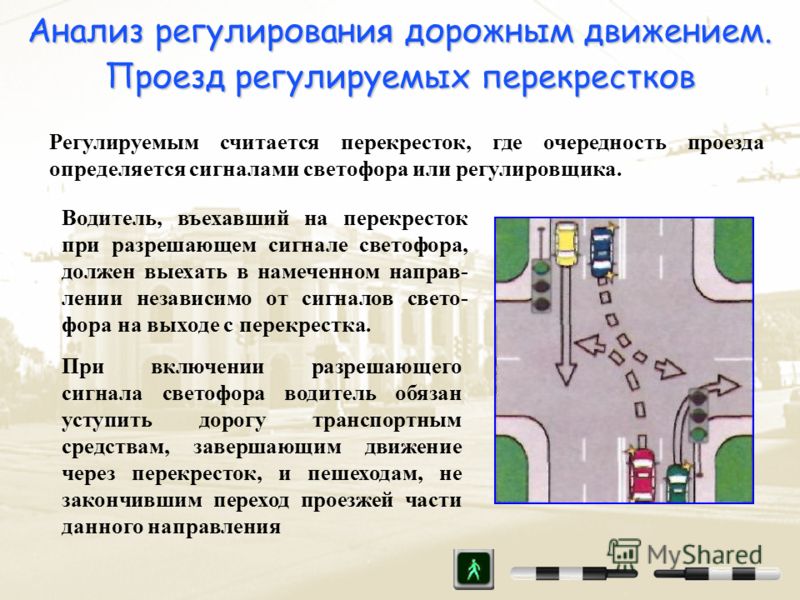
13.8. Водитель, въехавший на перекресток при разрешающем сигнале светофора, обязан выехать в намеченном направлении независимо от сигналов светофора на выезде с перекрестка. Однако, если на перекрестке перед светофорами, расположенными на пути следования водителя, имеются стоп-линии и (или) знаки 5. 33, водитель обязан руководствоваться сигналами каждого светофора.
33, водитель обязан руководствоваться сигналами каждого светофора.
13.9. При включении разрешающего сигнала светофора водитель обязан уступить дорогу транспортным средствам, завершающим движение через перекресток, и пешеходам, не закончившим переход проезжей части данного направления.
13.10. На перекрестке, где движение регулируется светофором с дополнительной секцией, водитель, находящийся на полосе, с которой производится поворот, должен продолжить движение в направлении, указанном включенной стрелкой, если его остановка создаст помеху транспортным средствам, следующим за ним по той же полосе.
Нерегулируемые перекрестки
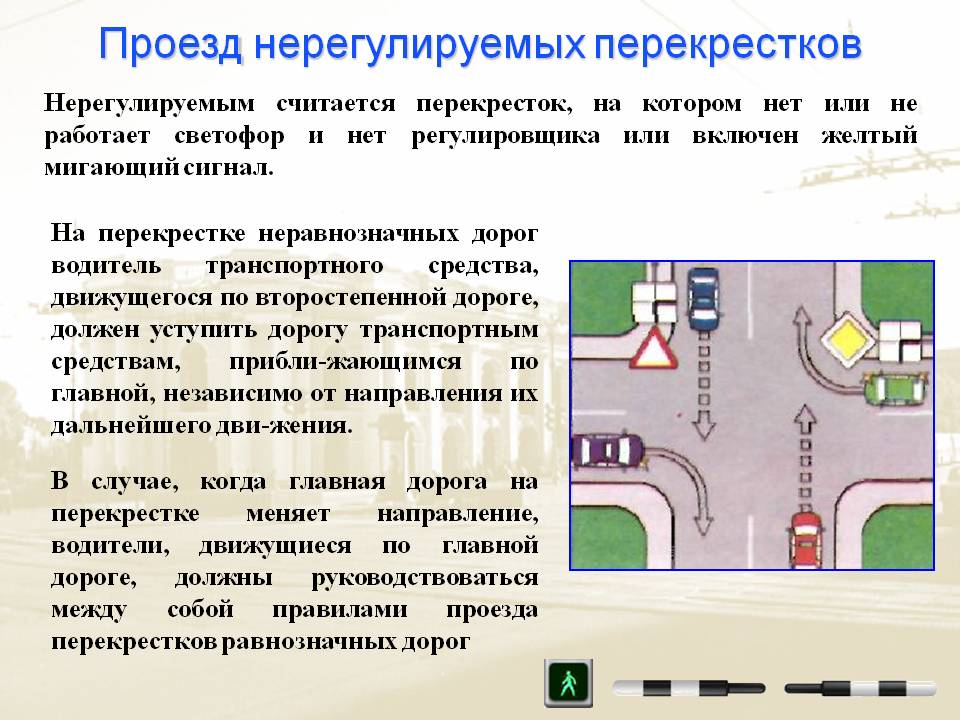
13.11. На перекрестке неравнозначных дорог водитель транспортного средства, движущегося по второстепенной дороге, обязан уступить дорогу транспортным средствам, приближающимся по главной, независимо от направления их дальнейшего движения, в том числе осуществляющих разворот. Водитель, движущийся по главной дороге, имеющей разделительную полосу, перед завершением на перекрестке разворота должен убедиться, что транспортные средства, приближающиеся к перекрестку по второстепенной дороге, уступают ему дорогу.
13.12. В случае, когда главная дорога на перекрестке меняет направление, водители, движущиеся по главной дороге, обязаны руководствоваться между собой правилами проезда перекрестков равнозначных дорог. Этими же правилами обязаны руководствоваться водители, движущиеся по второстепенным дорогам.
13.13. На перекрестке равнозначных дорог водитель безрельсового транспортного средства обязан уступить дорогу транспортным средствам, приближающимся справа. Этим же правилом обязаны руководствоваться между собой водители трамваев.
На таких перекрестках трамвай имеет преимущество перед безрельсовыми транспортными средствами независимо от направления его движения.
13.14. При повороте налево или развороте водитель безрельсового транспортного средства обязан уступить дорогу транспортным средствам, движущимся по равнозначной дороге со встречного направления прямо или направо. Этим же правилом должны руководствоваться между собой водители трамваев.
13.15. Если водитель не может определить наличие покрытия на дороге (темное время суток, грязь, снег и тому подобное), а знаков приоритета нет, он должен считать, что находится на второстепенной дороге.
Другие разделы ПДД Казахстана
Раздел 1 ПДД РК ОБЩИЕ ПОЛОЖЕНИЯ Раздел 2 ПДД РК ОБЩИЕ ОБЯЗАННОСТИ ВОДИТЕЛЕЙ Раздел 3 ПДД РК ОБЯЗАННОСТИ ПЕШЕХОДОВ Раздел 4 ПДД РК ОБЯЗАННОСТИ ПАССАЖИРОВ Раздел 5 ПДД РК СИГНАЛЫ СВЕТОФОРА И РЕГУЛИРОВЩИКА Раздел 6 ПДД РК ПРИМЕНЕНИЕ СПЕЦИАЛЬНЫХ СИГНАЛОВ Раздел 7 ПДД РК ПРИМЕНЕНИЕ АВАРИЙНОЙ СИГНАЛИЗАЦИИ И ЗНАКА АВАРИЙНОЙ ОСТАНОВКИ Раздел 8 ПДД РК МАНЕВРИРОВАНИЕ Раздел 9 ПДД РК РАСПОЛОЖЕНИЕ ТРАНСПОРТНЫХ СРЕДСТВ НА ПРОЕЗЖЕЙ ЧАСТИ Раздел 10 ПДД РК СКОРОСТЬ ДВИЖЕНИЯ Раздел 11 ПДД РК ОБГОН, ВСТРЕЧНЫЙ РАЗЪЕЗД Раздел 12 ПДД РК ОСТАНОВКА И СТОЯНКА Раздел 14 ПДД РК ПЕШЕХОДНЫЕ ПЕРЕХОДЫ И ОСТАНОВКИ МАРШРУТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ Раздел 15 ПДД РК ДВИЖЕНИЕ ЧЕРЕЗ ЖЕЛЕЗНОДОРОЖНЫЕ ПУТИ Раздел 16 ПДД РК ДВИЖЕНИЕ ПО АВТОМАГИСТРАЛЯМ Раздел 17 ПДД РК ДВИЖЕНИЕ В ЖИЛЫХ ЗОНАХ Раздел 18 ПДД РК ПРИОРИТЕТ МАРШРУТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ Раздел 19 ПДД РК ПОЛЬЗОВАНИЕ ВНЕШНИМИ СВЕТОВЫМИ ПРИБОРАМИ И ЗВУКОВЫМИ СИГНАЛАМИ Раздел 20 ПДД РК БУКСИРОВКА МЕХАНИЧЕСКИХ ТРАНСПОРТНЫХ СРЕДСТВ Раздел 21 ПДД РК УЧЕБНАЯ ЕЗДА Раздел 22 ПДД РК ПЕРЕВОЗКА ПАССАЖИРОВ Раздел 23 ПДД РК ПЕРЕВОЗКА ГРУЗОВ Раздел 24 ПДД РК ДОПОЛНИТЕЛЬНЫЕ ТРЕБОВАНИЯ К ДВИЖЕНИЮ ВЕЛОСИПЕДОВ, МОПЕДОВ, ГУЖЕВЫХ ПОВОЗОК, А ТАКЖЕ ПРОГОНУ ЖИВОТНЫХ Справочник по системам управления трафиком
: Глава 7 Локальные контроллеры
Источник: Eagle Products
Рисунок 7-1. Контроллер модели 2070.
Контроллер модели 2070.
7.1 Введение
В этой главе представлена подробная информация о контроллерах светофоров на перекрестках, чтобы пользователь мог:
- Понять принципы работы контроллера,
- Ознакомьтесь с различными типами контроллеров, а
- Выберите контроллеры для конкретных приложений.
В таблице 7-1 представлены некоторые основные определения, используемые на протяжении всей главы, а в таблице 7-2 обобщены функции, выполняемые локальным контроллером. В таблице 7-3 приведены два различных режима работы контроллера сигналов светофора — изолированный и скоординированный. Сигнал, работающий в изолированном режиме, также можно назвать свободным или нескоординированным.
| Условия | Определения |
|---|---|
| Контроллер в сборе | Полный электрический механизм, установленный в шкафу для управления
сигнальная операция. |
| Блок контроллера | Часть контроллера в сборе, которая выбирает и определяет время отображения сигналов. |
| Блок контроллера пересечения | Традиционное и оригинальное использование, чаще всего обозначаемое как трафик . Контроллер сигналов . |
| Специальный контроллер | Включает устройства для контроля использования полосы движения и другие приложения, не связанные с традиционное предоставление полосы отвода для транспортных средств и пешеходов на перекрестках или в средних кварталах. |
 Сборка контроллера обычно включает в себя шкаф.
Сборка контроллера обычно включает в себя шкаф.
|
| Режим | Определения |
|---|---|
| Изолированный (бесплатно) | Контроллер сигнала определяет время назначения полосы отвода независимо других сигналов. Если задействована одна или несколько фаз, длина цикла может варьироваться от одного цикла к другому. |
| Скоординированный | Синхронизация контроллера сигналов согласована с синхронизацией одного или нескольких соседних светофоры, чтобы избежать остановки приближающихся взводов автомобилей.Традиционно это включает в себя управление этим и соседними сигналами с одинаковой фиксированной длительностью продолжительность цикла. С помощью адаптивных методов координации можно достичь координации позволяя продолжительности цикла изменяться от одного цикла к другому. |
В следующем разделе этой главы рассматриваются контроллеры для приложений, отличных от сигналов светофора. См. Также главы 3 и 4 данного Руководства для получения дополнительной информации о некоторых специальных концепциях управления.
7.2 Типы операций
Несмотря на множество вариаций конструкции, светофоры можно классифицировать по типу эксплуатации как:
- Предварительное (или фиксированное время),
- с полным приводом и
- Полу-активный.
Таблица 7-4 описывает характеристики и применение каждого из этих типов.
| Эксплуатация | Характеристики |
|---|---|
| Предварительно | Возникновение и продолжительность всех временных интервалов, как для транспортных средств, так и для пешеходов, во всех фазах предопределены. |
| Полностью активированный | • Все фазы активированы (т. Е. Используются датчики транспортных средств или пешеходов). • Фазы пропускаются (не обслуживаются), если нет транспортных средств или пешеходов. обнаружен. • Если обнаружены транспортные средства, но не пешеходы, только часть транспортного средства фазы могут быть обслужены. • Зеленый интервал фаз может варьироваться по продолжительности от минимального и максимальные значения, в зависимости от обнаруженной потребности в трафике.Когда автомобиль покидает детектор, зеленый цвет увеличивается на несколько секунд, известных как проход время или зеленое продление. Фаза прекращается, если все детекторы фазы оставаться незанятым дольше, чем время «перерыва». • Интервал ходьбы обычно фиксированной продолжительности, но если сигнал согласовано, интервал ходьбы может быть увеличен, чтобы использовать предсказуемое дополнительное зеленое время, особенно для фаз главной улицы. • Другие интервалы (например, желтый, красный зазор, мигание Не Walk) имеют фиксированную продолжительность. |
| Полу-активный | • Гарантированно обслуживается как минимум одна фаза, в то время как другие
активирован. • На этот этап отводится гарантированное или фиксированное минимальное время. • Если нет потребности в активированных фазах, гарантированная фаза остается зеленым дольше, чем «фиксированное» время зеленого цвета. • Если сигнал скоординирован, гарантированной фазой обычно является главная улица через фазу. Если задействованные фазы обрываются до использования всех их разделенное распределение, свободное время можно переназначить на гарантированный фазы, в результате чего он получает больше, чем «фиксированное» количество зеленый. |
Активированный сигнал светофора — это сигнал, в котором детекторы транспортных средств или пешеходов используются для активации определенной фазы (изменения цвета с красного на зеленый) только при наличии транспортных средств или пешеходов.После активации продолжительность зеленого дисплея может варьироваться в зависимости от количества обнаруженных транспортных средств.
Предварительно заданные или фиксированные по времени фазы обслуживаются в течение фиксированной продолжительности каждый цикл независимо от количества присутствующих транспортных средств или пешеходов. Сигнал устанавливается заранее, если все фазы фиксированы, и полностью включается, если все фазы используют обнаружение. Полуавтоматический сигнал состоит из предварительно заданных фаз и фаз срабатывания.
Координированные сигналы часто работают в полуактивированном режиме.В этом случае сквозные фазы главной улицы не нуждаются в детекторах и обслуживаются каждый цикл независимо от спроса. Скоординированный сигнал должен работать с циклом фиксированной продолжительности. В типичном полу-активированном сигнале, если одна или несколько задействованных фаз не требуют всей выделенной им части цикла, неиспользованное время автоматически переназначается для незадействованных фаз главной улицы, которые всегда заканчиваются (становятся желтыми) в одна и та же точка цикла независимо от того, насколько рано они начинаются (становятся зелеными).
Большинство современных контроллеров светофоров поддерживают все эти типы сигналов. Даже несмотря на то, что контроллер сигналов может обеспечивать функции срабатывания для всех фаз, любую или все фазы можно заставить работать в соответствии с заранее заданным временем с помощью входа «вызов не сработавшего» или с помощью параметров фазы, таких как возврат, минимальный зеленый и согласованное обозначение фаз.
7.3 Область применения
Типы работы с сигналом
Таблица 7-5 суммирует применения описанных выше типов работы сигналов для каждой из следующих трех часто встречающихся сред перекрестков:
- Изолированный — сигнализируемый перекресток, который физически удален от других сигнализируемых перекрестков и, следовательно, не извлекает выгоду из координации сигналов.
- Артериальная дорога — сигнальный перекресток, который является одним из ряда смежных сигнальных перекрестков вдоль магистральной дороги, и на котором действует координация, по крайней мере, в течение некоторого времени дня — обычно встречается в пригородных зонах. Сетка
- — сигнальный перекресток, который является одним из ряда смежных сигнализационных перекрестков в сетке из довольно коротких кварталов, обычно встречающихся в старых городских районах с высокой плотностью населения и центральных деловых районах.
| Тип операции | Изолированный | Артериальная | Сетка |
|---|---|---|---|
| Предварительно | Обычно не подходит. | Подходит только в том случае, если всегда согласовано и объемы боковых улиц высокий и последовательный. | Соответствующее |
| Полу-активный | Подходит, только если движение по главной улице постоянно интенсивное. | Подходит, если всегда согласовано. | Подходит для включения фаз левого поворота и других незначительных перемещений, и сигналы пешеходов в середине квартала. |
| Полностью активированный | Соответствующее | Подходит, если не всегда согласовано. | Обычно не подходит. |
| Опция объема для задействованных фаз (см. Раздел 7.5) | Подходит для фаз только с детекторами, удаленными более чем на 40 метров (125 футов). | Подходит для фаз только с детекторами, удаленными более чем на 40 метров (125 футов). | Обычно не подходит, потому что низкая скорость означает меньшее смещение детектора назад. |
| Опция плотности для задействованных фаз (см. Раздел 7.5) | Подходит для высоких скоростей, так как более высокий начальный зазор может уменьшить количество остановок. | Подходит для высоких скоростей, так как более высокий начальный зазор может уменьшить количество остановок. | Обычно не подходит из-за низких скоростей. |
Предусмотренное управление лучше всего подходит для мест, где трафик оказывается очень предсказуемым и постоянным в течение длительного периода времени, а соседние сигналы должны постоянно координироваться. Эти ситуации обычно встречаются в уличных сетях с плотной сеткой (1).
Полностью управляемая система управления обычно обеспечивает наиболее эффективную работу на изолированных перекрестках. Приняв решение установить светофор, сначала подумайте о полностью включенном управлении. Его способность реагировать на трафик регулирует продолжительность цикла и фазы (разделения) в соответствии с меняющимися требованиями от цикла к циклу.Редко когда объемы приближающегося движения на изолированном перекрестке остаются предсказуемо постоянными в течение длительного периода. Поскольку все фазы обычно не достигают пика одновременно, не следует предполагать, что полностью активированный сигнал работает с фиксированной длиной цикла даже при высокой нагрузке на трафик.
Полностью управляемое управление применимо к множеству схем фазирования и обнаружения сигнала, начиная от простого двухфазного режима до 8-фазной конфигурации с двумя кольцами. Из-за возможности пропуска фазы 8-фазный контроллер с двойным кольцом может работать как базовый двухфазный контроллер в условиях небольшого движения; при отсутствии запроса блок контроллера игнорирует эту фазу и продолжает движение по кольцу в поисках исправной фазы (1).
Если активный сигнал всегда координирован, затраты на создание и обслуживание сигнала могут быть снижены за счет использования полуактивированного сигнала, при котором главная улица проходит через фазы в качестве заранее заданных фаз без детекторов транспортных средств.
Защищенная, защищенная / разрешающая и разрешающая работа
Транспортные операции должны быть направлены на устранение ненужных задержек на сигнальных перекрестках. Надлежащее использование режима защищенного / разрешенного и разрешенного движения обеспечивает одно из средств уменьшения задержки при движении влево.
Обеспечьте отдельные фазы левого поворота только там, где это необходимо, потому что ненужные отдельные движения левого поворота увеличивают продолжительность цикла и задержки движения. Управление движением без отдельных операций левого поворота может минимизировать задержку для всех движений, включая левый поворот. Однако существуют условия, которые требуют защищенной / разрешающей операции или оправдывают защищенную (только) операцию. Асанте и др. предоставляет набор рекомендаций по защите от левого поворота (2). В отчете представлены рекомендации по:
- Обоснование какой-либо формы защищенного фазирования левого поворота,
- Выбор типа защиты от левого поворота и
- Порядок левых поворотов.
Постоянные переходы от одного типа операции к другому могут оказаться уместными, поскольку объемы трафика меняются с течением времени. Работа с трафиком также может изменяться с защищенной на защищенную / разрешающую или разрешающую работу, когда схемы трафика меняются в течение дня и / или недели.
При решении проблем с левым поворотом может быть важно предусмотреть карман для левого поворота для допустимых левых поворотов. Однако в некоторых случаях это потребует отказа от парковки возле стоп-линии, чтобы освободить место для дополнительной ширины, необходимой для кармана левого поворота.
Специальные элементы управления
В ряде приложений используются узлы контроллеров специального назначения с электрическим переключением сигнальной индикации наподобие контроллеров перекрестков. Некоторые из этих приложений включают:
- Проблесковые маячки различного назначения, например:
- Обозначение опасности проезжей части,
- Определение времени применения ограничений скорости,
- Идентификация опасности перекрестка с контролем остановки и
- Использование устройства визуального внимания с индивидуальными знаками остановки.
- Сигналы управления полосой движения (например, полосы с двусторонним движением),
- Знаки смены полосы движения на перекрестках,
- Сигналы передвижного моста и однополосные, двусторонние рабочие сигналы,
- Органы управления транспортными средствами с превышением высоты, чтобы избежать повреждения конструкции из-за превышения высоты грузовыми автомобилями, и
- Звуковые сигналы пешеходов (3, 4, 5), издающие зуммер или чирикающий звук для инициирования интервала или фазы ходьбы для слабовидящих.
7.4 Контроллер Evolution
Развитие контроллеров светофоров идет параллельно с развитием смежных отраслей электронной промышленности. Аппаратное обеспечение блока управления сигналами эволюционировало со времен моторных дисков и блоков переключения распределительных валов до адаптации микропроцессоров общего назначения для широкого спектра перекрестков и специальных приложений управления.
В первые годы управления сигналами светофора практически единственными коммерчески доступными блоками управления были блоки управления электромеханического типа.Позже несколько производителей представили полу- и полноприводные контроллеры, оснащенные вакуумными ламповыми цепями для функций синхронизации. Инженер-транспортник отрегулировал интервал и синхронизацию фазы с помощью регуляторов на панели управления. Трансформаторы и вакуумные лампы в этих аналоговых блоках генерировали значительное количество тепла, что требовало принудительной циркуляции и фильтрации воздуха в шкафах контроллеров. Некоторые производители сохранили распределительные валы с электромагнитным приводом для переключения ламп, в то время как другие использовали многослойные поворотные переключатели с шаговым реле и герметизированные реле.Эти контроллеры характеризовали малый срок службы компонентов и временные отклонения.
Замена вакуумной лампы на транзистор представила низковольтную схему с лишь небольшой частью прежнего тепловыделения. Цепи сильноточного нагревателя и цепи высоковольтных пластин B, которые когда-то требовались для электронных ламп, ушли со сцены. В середине 1960-х годов транзисторные схемы впервые использовались для функций синхронизации и фазирования. Более низкие рабочие температуры увеличивают срок службы компонентов, а цифровая синхронизация обеспечивает точность синхронизации и устраняет колебания.В этот период производители также представили твердотельный переключатель нагрузки для цепей лампы. В течение 1960-х годов также преобладали большие различия в компоновке компонентов и оборудования от производителя к производителю. Конструкции варьировались от тех, в которых все компоненты синхронизации и фазирования были размещены на одной печатной плате, до тех, в которых использовались модульные, подключаемые фазы и функционально-ориентированные конструкции.
Интегральная схема (ИС) оказалась следующим важным шагом в эволюции контроллеров, поскольку технология микрочипов значительно уменьшила размер компонентов.Эти очень маленькие микросхемы были соединены вместе в схемы и запечатаны внутри оболочки IC, чтобы сформировать микропроцессор. Это развитие привело к созданию микрокомпьютеров — небольших, легких и недорогих устройств, используемых сегодня практически повсеместно.
Индустрия управления дорожным движением быстро включила микропроцессоры в новые конструкции контроллеров сигналов. Они используются во всех современных контроллерах светофоров.
Функциональность и характеристики современного контроллера сигналов определяются скорее программным обеспечением, чем аппаратными средствами.Один и тот же физический контроллер может работать совершенно по-разному при загрузке с другим программным пакетом.
Для современных контроллеров сигналов светофора разработаны различные стандарты, в том числе разработанные Национальной ассоциацией производителей электрооборудования (TS 2) и Caltrans, New York DOT и FHWA (модель 170). Эти стандарты и Advanced Transportation Controller (включая ATC 2070) обсуждаются в разделе 7.6.
7.5 Характеристики контроллера
Синхронизация и координация сигналов
Контроллеры сигналов светофора поочередно обслуживают конфликтующие движения транспорта.Это требует присвоения зеленого времени одному движению, затем другому. Если левые повороты имеют отдельные органы управления и на сложных перекрестках может быть более двух конфликтующих движений. Продолжительность времени, необходимого для завершения одного цикла обслуживания для всех конфликтующих перемещений, называется длиной цикла, а распределение длины цикла между конфликтующими движениями трафика называется разделением.
Чтобы минимизировать задержку движения, желательно, чтобы взвод транспортных средств, выезжающих с одного перекрестка, прибывал на следующий перекресток во время зеленого дисплея.Это называется продвижением взвода и достигается путем координации действий соседних сигналов. Координация сигналов чаще всего достигается путем обработки соседних сигналов с одинаковой длиной цикла с заранее определенным смещением между началом цикла на одном пересечении и началом цикла на следующем. См. Главу 3 для дальнейшего обсуждения параметров синхронизации.
Продолжительность цикла, разделение и смещение может потребоваться изменить в течение дня по мере изменения объемов трафика.Таким образом, контроллеры позволяют пользователю устанавливать несколько наборов этих основных временных параметров координации. Каждый такой набор называется планом синхронизации или шаблоном синхронизации, и один план синхронизации или шаблон синхронизации действует в любой данный момент времени. Рабочий план или временная диаграмма могут быть изменены либо с помощью расписания по времени, хранящегося в контроллере, либо по команде от ведущего устройства.
Интервальное управление по сравнению с фазовым регулированием
Контроллеры сигналов движения, доступные сегодня, можно разделить на интервальные контроллеры (также называемые с предварительным расчетом времени) или фазовые контроллеры (также называемые активированными).Первые позволяют пользователю разделить цикл на любое количество интервалов, при этом продолжительность каждого интервала устанавливается пользователем. Затем пользователь определяет, какие выходные цепи в какие интервалы будут включены. Например, конкретный интервал может использоваться для измерения времени, когда часть зеленого цвета соответствует движению одного транспортного средства, часть мигающего сигнала не идет для пешеходного движения, желтый — для движения другого транспортного средства, а часть красного и постоянного света — нет. ходить для других.
Длина цикла равна сумме длительностей интервалов, и все интервалы рассчитываются по времени последовательно.Пользователь также может указать смещение начала цикла для координации сигналов. Продолжительность интервалов, определения выходных данных, длина цикла и смещение могут варьироваться от одного шаблона к другому, и, следовательно, могут меняться в течение дня.
Современные контроллеры интервалов обычно также допускают определенную степень срабатывания, при этом выбранные интервалы могут быть пропущены, если нет потребности, или продолжительность выбранных интервалов может динамически изменяться в зависимости от срабатывания детектора. Если интервал не использует все выделенное ему время, свободное время можно назначить следующему интервалу.Некоторые контроллеры позволяют пользователю создавать довольно сложную индивидуальную логику для управления возникновением и продолжительностью интервалов.
Контроллеры фазыиспользуют другой подход к синхронизации сигналов. Они делят цикл на фазы, каждая из которых имеет пять заранее определенных интервалов — зеленый, желтый и красный разрешения для управления транспортным средством; и ходьба и мигание не предназначены для пешеходов. Пользователь указывает продолжительность каждого из этих интервалов или, в случае зеленого интервала, минимальную и максимальную продолжительность.Если сигнал скоординирован, пользователь также указывает время разделения для каждой фазы и смещение начала цикла.
Пользователь назначает фазу набору совместимых движений транспортных средств и пешеходов. Если согласовано, время разделения для всех фаз в кольце должно в сумме равняться длине цикла. Каждой фазе назначено временное кольцо (рисунки 7-2 и 7-3). Фазы назначаются на одно и то же время звонка последовательно, но время звонка одновременно. Следовательно, если контроллер использует два кольца, две фазы могут синхронизироваться одновременно и независимо.
Контроллеры фазиспользуют барьеры или группы параллелизма фаз для определения конфликтов между фазами в различных элементах. Внутри группы параллелизма (между двумя барьерами) фазы в разных кольцах могут синхронизироваться независимо, но все кольца должны пересекать барьер (переходить в другую группу параллелизма фаз) одновременно.
В группе параллелизма (между двумя барьерами) пользователь может указать желаемый порядок (последовательность), в котором должны обслуживаться фазы в одном кольце. От одного шаблона к другому пользователь может изменять длину цикла, смещение, разделение и последовательность фаз.
Фазовое управление особенно хорошо подходит для управляемого управления на обычных перекрестках, особенно с защищенным движением левого поворота. Две задействованные фазы левого поворота на одной и той же улице могут синхронизироваться независимо, при этом, скажем, фаза поворота в западном направлении получает меньше времени, чем движение в восточном направлении в одном цикле, а противоположное происходит в следующем цикле. По этой причине, а также благодаря простоте настройки и дополнительным функциям срабатывания фазовые контроллеры стали доминирующим типом.
Рисунок 7-2.Последовательность фаз трехфазного контроллера для однокольцевого контроллера.
Рисунок 7-3. Последовательность фаз для контроллера с двойным кольцом.
В течение многих лет контроллеры фаз были ограничены восемью фазами, распределенными по двум кольцам в фиксированной конфигурации. Это очень хорошо работает для большинства перекрестков, но не обеспечивает гибкости, необходимой для необычно сложных перекрестков. Кроме того, если фиксированного времени достаточно и фазировка левого поворота не является распространенной, как это часто бывает в центральных деловых районах больших городов, контроллер интервала подойдет.Таким образом, контроллеры интервалов остались в использовании, хотя их количество сокращается, поскольку контроллеры фаз расширились, чтобы вмещать больше фаз и колец, и добавили такие функции, как перенаправление выходов. Каждая фаза в фазовом контроллере может управляться либо заранее (фиксированное время), либо активироваться.
Стандарт TS 2 Национальной ассоциации производителей электрооборудования (NEMA) определяет минимальные функциональные стандарты как для интервальных, так и для фазовых контроллеров. Большинство современных контроллеров отвечают большинству или всем этим минимальным требованиям, и большинство контроллеров также предоставляют дополнительные функции, которые еще не стандартизированы.
Компоненты контроллера и шкафа
Большинство современных контроллеров светофоров имеют следующие основные аппаратные компоненты:
- Пользовательский интерфейс (клавиатура и дисплей)
- Центральный процессор (микропроцессор, память и т. Д.)
- Разъемы для внешней связи (последовательные порты, Ethernet, USB, проводка шкафа и т. Д.)
- Источник питания (преобразует 110 В переменного тока в 24 В, 12 В, 5 В постоянного тока для внутреннего использования)
- Опциональный дополнительный процессор последовательной связи (FSK-модем, RS 232)
Порты последовательной связи часто используются для установления связи с главным блоком управления или компьютером.Такие соединения могут быть постоянными с удаленным главным компьютером или компьютером или временными с портативным компьютером, используемым полевым персоналом. Вместо последовательной связи все чаще используется Ethernet. Поскольку специальный последовательный порт может использоваться для связи с оборудованием внутри шкафа в случае шкафа с последовательной шиной (см. Разделы NEMA TS 2 и ATC ниже).
Внутри шкафа сигнального контроллера, подключенных к контроллеру, находятся следующие основные вспомогательные компоненты, которые взаимодействуют с контроллером:
- Блок управления неисправностями (также называемый монитором конфликтов)
- Детекторы транспортных средств и пешеходов (блоки датчиков, выключатели)
- Драйверы выходной цепи (индикаторы управляющих сигналов переключателей нагрузки)
- Дополнительные внешние устройства связи (внешний FSK-модем, оптоволоконный трансивер, беспроводной трансивер, коммутатор Ethernet и т. Д.)
Извещатели используются только для сработавших сигналов. Выключатель нагрузки использует низковольтный выход постоянного тока контроллера для включения или выключения цепи 110 В переменного тока, таким образом, включая или выключая отображение сигнала, видимое автомобилистами или пешеходами. Для определенной фазы одна цепь отключается, как и другая.
Блок управления неисправностями (MMU) может быть сконфигурирован для проверки индикации конфликтующих сигналов и различных других неисправностей, включая отсутствие выхода состояния ОК от контроллера (выход сторожевого таймера), короткие или отсутствующие интервалы зазоров и выходящие за допустимые пределы рабочие напряжения. .Если обнаружена неисправность, MMU автоматически переводит сигнал в состояние полностью красного мигания, подавляя выходы контроллера. Современные контроллеры могут определить это состояние и сообщить о неисправности на главный или центральный компьютер.
Выбор шаблона
Современные контроллеры предлагают следующие три альтернативных метода определения того, какой образец или план работы:
Внутреннее расписание по времени — пользователь настраивает расписание, которое сообщает контроллеру, когда следует изменить шаблон или план, в зависимости от дня недели и времени суток.Можно создать специальное расписание для праздников или других дат, когда условия дорожного движения необычны. Часы контроллера, которые отслеживают дату, день недели и время, регулярно сравниваются с записями в расписании. Никаких внешних коммуникаций не требуется. Этот механизм часто используется в качестве резервного, когда метод выбора внешнего шаблона не работает. Этот метод широко используется.
Жесткое межсоединение — несколько электрических проводов (обычно семь), проложенных между контроллером и главным устройством, имеют постоянное напряжение, подаваемое или отключенное, чтобы указать, какой шаблон или план следует использовать.Когда изменяется комбинация активных (напряжение включено) и неактивных (напряжение выключено) проводов, эта комбинация используется контроллером для поиска схемы или плана перехода. Традиционно этот метод использовался для независимого выбора того, какую из нескольких предопределенных длин цикла, смещения и разделения использовать, таким образом имитируя выбор клавиш набора, смещения и разделения в электромеханическом контроллере. Использование этого метода сокращается.
Внешняя команда — используя цифровую связь (обычно через последовательный порт или порт Ethernet на контроллере), главный блок или компьютер отправляет командное сообщение контроллеру, инструктируя его перейти на определенный шаблон.Этот метод широко используется. Если контроллер теряет связь с источником команд шаблона, он может автоматически вернуться к использованию своего внутреннего расписания выбора шаблона времени суток. Один и тот же канал связи обычно используется для получения информации о состоянии от контроллера и для удаленного изменения параметров контроллера.
Пользователь также может вручную заблокировать контроллер в соответствии с определенным шаблоном, так что любой из вышеперечисленных вариантов выбора шаблона игнорируется.
Синхронизация для координации
Для координации сигналов требуется, чтобы все контроллеры в скоординированной группе имели общую привязку по времени, чтобы смещения начала цикла применялись точно. До того, как в контроллерах появились внутренние часы, это обычно достигалось подключением контроллеров к главному устройству с использованием метода проводного межсоединения, описанного выше. Один раз в каждом цикле один из входных проводов меняет свое состояние на секунду или две (так называемый импульс), тем самым сигнализируя о начале фонового цикла всем подключенным контроллерам одновременно.Затем каждый контроллер умножает собственное смещение от этой общей контрольной точки. Использование этого метода проводного межсоединения сокращается в пользу координации временной базы.
Сегодня в контроллерах есть внутренние часы, способные сохранять достаточно точное время в течение как минимум нескольких дней. Все контроллеры в координационной группе могут быть настроены на использование одного и того же времени дня (например, полуночи) в качестве контрольной точки для расчета смещения. Предполагается, что общий фоновый цикл начинается в это время суток, и каждый контроллер может рассчитать свое собственное смещение от этой общей контрольной точки.Это называется согласованием временной базы.
В конце концов, однако, часы контроллера будут дрейфовать, и их необходимо будет установить на стандартное время. Часы можно сбросить любым из следующих способов:
Manual — периодически пользователь подходит к контроллеру в поле и сбрасывает время в соответствии с точно установленными часами или другим источником стандартного времени (например, отображение времени на сотовом телефоне, телефонный звонок на голосовое время и т. Д.). Этот метод не приветствуется, поскольку он трудоемок, подвержен ошибкам и может быть небрежным.В зависимости от модели контроллера значительный дрейф может потребовать ручного сброса всего лишь через несколько недель работы.
Hardwire pulse — ведущее устройство подает импульсный сигнал на проводной вход контроллера в заранее определенное время суток. Когда контроллер улавливает этот импульс, он устанавливает часы на заранее определенное время дня. Пока все контроллеры в координированной группе получают один и тот же импульс, не имеет значения, если часы ведущего устройства не совсем точны.
Внешняя команда — используя цифровую связь (обычно через последовательный порт или порт Ethernet на контроллере), главный блок или компьютер управления сигналами трафика отправляет команду контроллеру (скажем, один раз в день), давая ему указание немедленно установить часы до времени, указанного в сообщении. Можно координировать даже сигналы, управляемые разными центральными компьютерами, если на каждом центральном компьютере точно установлены часы.
Сторонний источник времени — стандартный источник времени, такой как радиоприемник WWV, монитор времени сотового телефона или подключение к Интернету, установлен в шкафу, и контроллер либо прослушивает периодические обновления времени вещания, либо периодически инициирует запрос для обновления времени с сервера времени.
Работа с активированным контроллером
Независимо от аппаратного стандарта, которому соответствует контроллер (NEMA, ATC или Model 170), функциональность резидентного программного обеспечения аналогична и обычно работает в соответствии со стандартом NEMA TS 2.
Основные временные характеристики управляемых блоков управления следующие:
- Каждая фаза имеет предустановленный минимальный интервал между зелеными сигналами, чтобы обеспечить время старта для стоящих автомобилей.
- Интервал между зелеными сигналами расширяется для каждого дополнительного срабатывания транспортного средства после истечения времени ожидания минимального интервала между зелеными сигналами при условии, что не возникает перерыва в движении, превышающего текущую настройку продления единицы.
- Предварительно установленный максимальный предел зеленого расширения. Контроллеры предоставляют два выбираемых максимальных предела (обычно называемых MAX I и MAX II).
- Интервалы смены желтого и красного цвета предварительно установлены для каждой фазы. Красный зазор нужен не всегда.
В дополнение к входам датчиков, каждая фаза снабжена средствами, позволяющими пользователю постоянно звонить в службу технического обслуживания автомобиля (минимальный или максимальный вызов зеленого цвета) или для обслуживания пешеходов (вызов пешеходов).Максимальный повторный вызов зеленого цвета вызывает вызов для фазы и при обслуживании предотвращает его завершение до истечения максимального времени таймера зеленого цвета.
Таймер максимального зеленого света на соответствующей фазе не начинает отсчет времени до тех пор, пока не вызовет исправный детектор противофазной фазы. Следовательно, фаза с постоянным спросом может оставаться зеленым в течение некоторого времени, прежде чем будет зарегистрирован конфликтующий вызов, который запускает отсчет максимального зеленого цвета.
Принципы управления фазой, относящиеся к кольцам и барьерам, описаны в таблице 7-6, а основные параметры синхронизации описаны в таблице 7-7.
| Элемент | Описание |
|---|---|
| Блок контроллера с одним кольцом | Содержит от 2 до 4 последовательно синхронизированных и индивидуально выбранных конфликтующих фазы расположены в установленном порядке или последовательности. Фазы могут пропускаться в 3-х и 4-х фазных контроллерах. Фазы в кольце пронумерованы. как показано на Рисунке 7-2. |
| Контроллер с двойным кольцом | Содержит 2 взаимосвязанных кольца, расположенных по времени в предпочтительной последовательности и разрешить одновременную синхронизацию соответствующих фаз в обоих кольцах, при условии на ограничение барьеров (линии совместимости). Каждое кольцо может содержать до двух фаз в каждой из двух барьерных групп, всего восемь фазы. Затем каждая из соответствующих фазовых групп должна пересечь барьер. одновременно для выбора и времени фазы в группе фаз на другом боковая сторона.Фазы в 2 кольцах синхронизации пронумерованы, как показано на Рисунок 7-3. |
| Блок многокольцевого контроллера | Контроллер, поддерживающий более восьми фаз и двух колец. Любой номер фаз, до максимума, поддерживаемого контроллером, можно расположить в любом количестве колец. Конфликты между фазами в разных кольцах задается либо с помощью барьеров, вставленных между группами фаз, либо с помощью фаз Списки параллелизма Этот документ не был проверен в поле.Я бы не рекомендую включать его сюда, если явно не включен отказ от ответственности. |
| Барьер (линия совместимости) | Контрольная точка в обозначенной последовательности двойных и множественных колец. блоки контроллеров, на которых кольца заблокированы. Барьеры гарантируют конфликт фазы не будут выбираться или время одновременно. У барьера кольца заканчиваются текущую фазу и одновременно пересекают барьер, как показано на Рисунок 7-3. |
| Двойной вход | Режим работы в контроллерах с двойным кольцом и с несколькими кольцами в какая одна фаза в каждом кольце должна быть в рабочем состоянии. Если звонка не существует в одном из колец при переходе через барьер (из другой фазовой группы), в этом кольце выбирается фаза, которая будет активирована контроллером в предопределенным образом. Например, снова обратившись к рис. 7-3 в отсутствие вызовов на Фазах 7 и 8, Фазах 2 и Фазах 6 завершение обслуживания звонок на Фазе 3.Программирование для двойного входа определяет, будет ли фаза 7 или Фаза 8 будет выбрана и рассчитана одновременно с Фазой 3, даже если нет вызова ни на Фазе 7, ни на Фазе 8. |
| Однократный вход | Режим работы в контроллерах с двойным кольцом и с несколькими кольцами в который фаза в одном кольце может быть выбрана и рассчитана отдельно, когда есть нет потребности в обслуживании неконфликтной фазы в другом кольце.Например, как показано на рисунке 7-3, после завершения фазы 2 и фазы 6 блок контроллера будет обслуживать вызов на Фазе 3 при отсутствии вызовов на либо фаза 7, либо фаза 8. Пока выбрана и рассчитана только фаза 3, фазы 7 и 8 (в кольце 2) останутся в красном состоянии. |
| Настройка | Описание |
|---|---|
| Минимальный зеленый | Абсолютная минимальная продолжительность зеленой индикации фазы.Фаза не может быть выдвинут или вынужден выключиться в течение этого интервала. |
| Переменный начальный зеленый | Время, рассчитанное по количеству срабатываний датчика приближения во время красный. При отсутствии детектора стоп-сигнала это дает достаточно времени для служебные автомобили стояли в очереди между стоп-линией и детектором опережения. В фаза не может прерываться или быть принудительной в течение этого интервала. Продолжительность этого интервала зависит от связанных параметров, включая добавленный начальный (количество зеленого, добавляемого за срабатывание) и максимальное начальное значение. |
| Пешеходная прогулка | Минимальная длительность индикации пешеходного перехода. Фаза не может быть выдвинут или вынужден выключиться в течение этого интервала. |
| Расстояние для пешеходов | Фиксированная продолжительность мигающего индикатора «Не ходить» для пешеходов. Фаза не может быть прервана или принудительно отключена (кроме железнодорожных или аварийных ситуаций). упреждение транспортного средства) в течение этого интервала. |
| Зеленый внутренний номер | Количество времени, на которое продлевается зеленый свет после обнаружения транспортного средства. Если срок действия минимального зеленого, переменного начального зеленого, прогулки и FDW истек, и в настоящее время вход датчика приближения не включен, фаза зеленого цвета может исчезнуть (разрыв), если временной интервал между идущими подряд транспортными средствами превышает зеленый время продления плюс время, в течение которого вход датчика остается включенным, пока автомобиль ощущается. |
| Максимум зеленый | Даже если автомобили все еще приближаются, фаза зеленого цвета будет прекращена (принудительно выключен) по истечении этого общего времени зеленого цвета после вызова сервис на конфликтной фазе. Этот параметр имеет приоритет над зеленым расширением, но ни один из других параметров выше. |
| Желтый зазор | Фиксированная продолжительность желтой индикации, которая всегда следует за зеленой индикация. |
| Красный зазор | Время, в течение которого завершающаяся фаза и последующие конфликтующие фаза (ы) перед началом, одновременно отображается красный индикатор. |
Одна или несколько задействованных фаз также могут использовать параметры объема и / или плотности, каждая из которых является дополнением к базовой управляемой операции, как показано ниже.
- Опция «volume» увеличивает начальный интервал зеленого таймера каждый раз, когда обнаруживается транспортное средство, когда фаза красная.Минимальный зеленый цвет рассчитывается как большее из нормального минимального зеленого, и это вычисленное начальное значение зеленого до максимума. При отсутствии детекторов стоп-сигнала его можно использовать для подсчета количества транспортных средств, ожидающих перед детекторами опережения, и при необходимости увеличить минимальный зеленый цвет, чтобы очистить эту очередь.
- Опция «плотность» уменьшает время перерыва, пока фаза зеленая, если на других фазах ждут (были обнаружены) автомобили или пешеходы. Разрыв постепенно сокращается с течением времени, что требует все большей плотности приближающегося трафика, чтобы избежать прерывания грина.
Контроллер с двойным кольцом обеспечивает различную последовательность фаз левого поворота. В таблице 7-8 и на рисунке 7-4 описаны варианты последовательности фаз для сигнала с нечетными пронумерованными фазами, обслуживающими левые повороты, и четными пронумерованными фазами, обслуживающими встречные движения посредством движений. Типичные варианты последовательности левого поворота — впереди налево, вперед-назад налево и отстают налево. Одна такая последовательность может использоваться на одной улице (одна группа барьеров), в то время как другая последовательность может использоваться на другой улице.
| Последовательность | Описание |
|---|---|
| Передний левый поворот | Последовательность начинается с фаз 1 и 5, противоположные ходы движутся вместе. Когда потребление заканчивается или достигается максимум зеленого цвета на Фазе 1 или Фазе 5, соответствующий левый поворот прекращается после соответствующего изменения и зазора интервалы, и дано противоположное сквозное движение (Фаза 2 или Фаза 6) зеленая индикация одновременно с сопровождающим его левым поворотом.Как спрос заканчивается или достигается максимум зеленого цвета на оставшемся левом повороте, это прекращается после соответствующих интервалов замены и зазоров, а его противодействующее сквозное движение освобождается. Затем фазы 2 и 6 выполняются вместе, пока спрос заканчивается или достигнуто максимальное время зеленого цвета для обеих фаз. Фазы затем, после отображения правильных интервалов замены и зазоров, прекратить одновременно на преграде. Как показано на рисунке 7-4, вышеуказанный этап последовательность также применяется к фазам за барьерной линией (Фазы 3, 4, 7 и 8) в группе других фаз. |
| Опережение-отставание, левый поворот | Последовательность начинается с фазы 5, поворота налево и сопровождающей его фазы. 2 движутся одновременно. Когда потребность заканчивается или достигается максимум зеленого цвета на фазе 5, этот левый поворот заканчивается после соответствующих интервалов замены и зазоров. Противоположное сквозное движение, Фаза 6, переходит в Фазу 2. Как спрос заканчивается или достигается максимум зеленого цвета для Фазы 2, он прекращается после надлежащие интервалы замены и зазоров на шлагбауме |
Глава 7 — Сигнальные перекрестки: Информационное руководство, август 2004 г.
PDF-файлы можно просматривать с помощью Acrobat® Reader®
ГЛАВА 7 — МЕТОДЫ ОПЕРАЦИОННОГО АНАЛИЗА
СОДЕРЖАНИЕ
7.0 ОПЕРАЦИОННЫЕ МЕТОДЫ АНАЛИЗА
7.1 Оперативные показатели эффективности
7.1.1 Вместимость автотранспортных средств и отношение объема к грузоподъемности
7.1.2 Задержка автотранспортных средств и уровень обслуживания
7.1.3 Очередь автомобилей
7.1.4 Транзитный уровень обслуживания
7.1.5 Велосипед Уровень обслуживания
7.1.6 Уровень обслуживания пешеходов
7.2 Элементы управления движением
7.2.1 Характеристики объема трафика
7.2.2 Геометрия пересечения
7.2.3 Синхронизация сигналов
7.3 Практические правила определения размера перекрестка
7.4 Анализ критических движений
7.5 Операционная процедура HCM для сигнальных перекрестков
7.6 Модели синхронизации артериальных и сетевых сигналов
7.7 Моделирование под микроскопом
СПИСОК ЦИФР
СПИСОК ТАБЛИЦ
В главе 6 описаны инструменты, которые можно использовать для оценки показателей безопасности на сигнальном перекрестке.Оценка возможного лечения обычно требует, чтобы его эффективность также оценивалась с точки зрения транспортных операций. Таким образом, в этой главе основное внимание будет уделено показателям оценки эксплуатационных характеристик и вычислительным процедурам, используемым для определения конкретных значений этих показателей.
Взаимосвязь между показателями безопасности и эксплуатационными характеристиками трудно определить в общих чертах. Некоторые виды обработки перекрестков, которые могут повысить безопасность, могут также улучшить эксплуатационные характеристики, но другие могут снизить эксплуатационные характеристики.Кроме того, характер мер безопасности и эксплуатационных мер затрудняет их объединение таким образом, чтобы отражать обе точки зрения.
Показатели эксплуатационных характеристик, как правило, меньше и их легче увязать с условиями, характерными для конкретной площадки, чем показатели показателей безопасности. Сами вычисления больше поддаются детерминированным моделям, и доступно большое количество таких моделей, в основном программных. Выбор модели для конкретной цели обычно основан на компромиссе между сложностью применения модели и требуемой степенью точности и уверенности в результатах.Степень сложности приложения отражается в необходимом количестве данных для конкретного объекта, а также в уровне времени и обучения персонала, необходимого для применения модели и интерпретации результатов.
Недавние усовершенствования пользовательского интерфейса в более продвинутых программных продуктах модели трафика сделали их намного проще в применении; некоторые могут создавать анимированные графические изображения, изображающие движение отдельных транспортных средств и пешеходов на перекрестке (пример на рисунке 53).В результате этих улучшений возникла растущая тенденция к использованию и принятию передовых методов моделирования трафика.
Хотя диапазон моделей эксплуатационных характеристик более или менее непрерывен, для целей данного обсуждения он будет разделен на следующие четыре уровня анализа:
- Эмпирические правила определения размеров перекрестков.
- Анализ критического движения.
- Процедура оперативного анализа HCM 2000 . (2)
- Расчет времени и модели оценки артериального сигнала.
- Микроскопические имитационные модели.
Эти уровни перечислены в порядке сложности и сложности приложений, от наименьшей к наибольшей. Они представлены на рисунке 54 с точки зрения их входных и выходных данных и данных, которые могут передаваться между ними. Каждый уровень анализа будет обсуждаться отдельно.
Процесс оценки эксплуатационных характеристик перекрестка остается неизменным, независимо от уровня анализа и имеющихся проблем.Анализ должен начинаться с самого высокого уровня и переходить к следующему уровню детализации до тех пор, пока ключевые вопросы и опасения, связанные с операциями, не будут рассмотрены достаточно подробно.
| Рис. 53. Неподвижное воспроизведение графики из анимированной модели транспортных операций. |
Способность измерять, оценивать и прогнозировать транспортные операции — фундаментальный элемент эффективной диагностики проблем и выбора соответствующих методов лечения сигнальных перекрестков.Анализ транспортных операций должен описывать, насколько хорошо перекресток удовлетворяет спрос для всех групп пользователей. Анализ транспортных операций может использоваться на высоком уровне для определения размера объекта и на более детальном уровне для разработки планов синхронизации сигналов. В этом разделе описываются ключевые элементы сигнальных операций на перекрестках и даются рекомендации по оценке результатов.
7.1 Оперативные показатели эффективности
Для оценки сигнализационных перекрестков обычно используются три показателя эффективности:
- Вместимость и соотношение объема к вместимости.
- Задержка.
- Очередь.
HCM 2000 оценивает эффективность по группам дорожек. (2) Группа полос включает движение или движения, которые имеют общую полосу остановки. Полосы с эксклюзивным поворотом обычно рассматриваются как отдельные группы полос (т. Е. Полоса с правом поворота). Совместные движения (например, одна или несколько полос движения, которые также обслуживают правые повороты) представлены в виде одной группы полос. Результаты группы полос могут быть агрегированы по подходам и для всего перекрестка.
Другие международные процедуры анализа емкости, включая австралийский пакет программного обеспечения SIDRA для анализа, (70) , руководство по емкости для Канады, (71) и руководство по емкости для Швеции, (72) , предоставляют методы для оценки показателей производительности на индивидуальный уровень полосы движения. Эти процедуры неявно предполагают равное отношение объема к пропускной способности (v / c) на «выбранных полосах движения» (т. Е. На проходной и проходной полосе с поворотом направо).
Рисунок 54.Обзор моделей анализа движения на перекрестках. |
7.1.1 Грузоподъемность автотранспортных средств и отношение объема к грузоподъемности
Пропускная способность определяется как максимальная скорость, с которой транспортные средства могут проезжать через заданную точку в час при преобладающих условиях; его часто оценивают на основе предполагаемых значений потока насыщения. Пропускная способность учитывает состояние проезжей части, например количество и ширину полос движения, уклон и распределение полос движения, а также условия сигнализации.В соответствии с процедурой HCM 2000 пропускная способность перекрестков измеряется для критических групп полос (тех групп полос, которые требуют наибольшего количества зеленого времени). Отношение объема к пропускной способности пересечения основано на критических группах полос движения; группы некритических полос движения не ограничивают работу светофора. Правила определения критических групп полос более подробно описаны в HCM 2000 .
Исследование, проведенное в рамках HCM 1985 года, показало, что пропускная способность критических полос движения на сигнальном перекрестке составляла примерно 1400 автомобилей в час. (73) Эта производительность является оценкой на уровне планирования, которая учитывает влияние времени потерь и типичных расходов насыщения. Исследования, проведенные в штате Мэриленд, показали, что сигнальные перекрестки в урбанизированных районах имеют критическую пропускную способность, превышающую 1800 автомобилей в час. (74)
Отношение об / с, также называемое степенью насыщения, представляет собой достаточность перекрестка для удовлетворения спроса транспортных средств. Отношение об / с менее 0.85 в целом указывает на то, что имеется достаточная пропускная способность и что у транспортных средств не ожидается значительных очередей и задержек. Когда соотношение v / c приближается к 1,0, поток трафика может стать нестабильным, и могут возникнуть условия задержки и очереди. Как только потребность превышает пропускную способность (отношение v / c больше 1,0), поток трафика становится нестабильным, и ожидается чрезмерная задержка и формирование очереди. В этих условиях транспортным средствам может потребоваться более одного сигнального цикла для проезда через перекресток (это называется отказом цикла).Для целей проектирования обычно используется коэффициент об / с между 0,85 и 0,95 для часа максимальной нагрузки в горизонтальном году (обычно через 20 лет). Следует избегать чрезмерного проектирования перекрестка из-за негативного воздействия на пешеходов, связанного с более широкими пересечениями улиц, возможностью превышения скорости, воздействием землепользования и стоимостью.
7.1.2 Задержка автотранспортных средств и уровень обслуживания
Задержка определяется в HCM 2000 как «дополнительное время в пути, которое испытывает водитель, пассажир или пешеход.” (2) В главе о сигнальных перекрестках (глава 16) HCM приводятся уравнения для расчета контрольной задержки, задержки, которую испытывает автомобилист, которая связана с наличием светофора и конфликтным движением. Это включает время, затраченное на замедление, в очередь и на ускорение.
Уравнение задержки управления состоит из трех элементов: равномерной задержки, возрастающей задержки и начальной задержки очереди. Основными факторами, влияющими на задержку управления, являются объем группы полос, пропускная способность группы полос, продолжительность цикла и эффективное время выхода на зеленый свет.Предусмотрены факторы, которые учитывают различные условия и элементы, включая тип контроллера сигналов, измерения в восходящем направлении, а также эффекты задержки и очереди в условиях перенасыщения.
Задержка управления используется как основа для определения LOS. Задержка управления перекрестком обычно вычисляется как средневзвешенное значение средней задержки управления для всех групп полос на основе объема в каждой группе полос. Следует проявлять осторожность при оценке перекрестка на основе единственного значения контрольной задержки, поскольку это может привести к завышению или занижению количества операций для отдельных групп полос.Пороги задержки для различных гетеродинов приведены в таблице 33.
Таблица 33. Пороги LO для автотранспортных средств на сигнальных перекрестках (2)
ЛОС | Задержка управления на автомобиль |
|---|---|
А | ≤ 10 |
Б | > 10-20 |
С | > 20–35 |
D | > 35–55 |
E | > 55-80 |
F | > 80 |
7.1.3 Очередь автомобилей
Очереди транспортных средств — важный показатель эффективности, который следует оценивать как часть всех анализов сигнальных перекрестков. Оценки очередей транспортных средств необходимы для определения объема памяти, необходимого для полос поворота, и для определения того, происходит ли перетекание на объектах, расположенных выше по течению (подъездные пути, несигнализированные перекрестки, сигнальные перекрестки и т. Д.). Подходы, в которых возникают большие очереди, также могут столкнуться с чрезмерным количеством наездов сзади.
Очереди транспортных средств для целей проектирования обычно оцениваются на основе 95 -й процентильной очереди, которая ожидается в течение расчетного периода. В приложении G к главе 16 HCM 2000 приведены процедуры для расчета очереди. Кроме того, все известные имитационные модели предоставляют способы получения оценок очереди.
7.1.4 Транзитный уровень обслуживания
Оценка пропускной способности и качества услуг является предметом отдельного справочного документа, Руководства по пропускной способности и качеству обслуживания . (75) Кроме того, уличные элементы из этого документа представлены в HCM 2000 в главах 14 и 27. (2) Пространство не позволяет воспроизводить эти элементы в этом документе; поэтому читателю рекомендуется просмотреть эти ссылки для получения дополнительной информации о различных доступных методах оценки качества обслуживания и мощности.
7.1.5 Велосипед Уровень обслуживания
HCM 2000 обеспечивает процедуру анализа для оценки LOS для велосипедов на сигнальных перекрестках, где есть обозначенная уличная велосипедная полоса по крайней мере на одном подходе.В этом разделе повторяется процедура из главы 19 HCM 2000 .
Многие страны сообщили о широком диапазоне пропускной способности и скорости потока насыщения для велосипедных дорожек на сигнальных перекрестках. HCM 2000 рекомендует использовать скорость потока насыщения 2000 велосипедов в час в качестве среднего значения, достижимого на большинстве перекрестков. Этот показатель предполагает, что автомобили, поворачивающие направо, уступают дорогу велосипедистам. Там, где существует агрессивное движение с поворотом направо, эта скорость может быть недостижимой, и для определения соответствующей скорости потока насыщения рекомендуется проводить локальные наблюдения.
Используя скорость потока насыщения по умолчанию, равную 2000 велосипедов в час, пропускную способность велосипедной полосы на сигнальном перекрестке можно вычислить с помощью уравнения 6:
(6) |
| Где: | c b = пропускная способность велосипедной дорожки (велосипеды / час) |
| с b = скорость потока насыщения велосипедной дорожки (велосипеды / час) | |
| г = эффективное зеленое время для велосипедной полосы в секундах (с) | |
| C = длина сигнального цикла (с) |
На большинстве перекрестков с сигнализацией единственная задержка для велосипедов вызвана самим сигналом, потому что велосипеды имеют право проезда для транспортных средств при повороте.В тех случаях, когда велосипеды вынуждены переплетаться с движением автотранспорта или когда велосипедная полоса дороги нарушается из-за поворотного движения, может возникнуть дополнительная задержка. Задержка управления оценивается с использованием первого члена уравнения задержки для автомобилей на сигнализируемых перекрестках, что предполагает отсутствие задержки переполнения. Это разумно в большинстве случаев, поскольку велосипедисты обычно не терпят ситуации переполнения и будут использовать другие маршруты. Эта задержка управления оценивается с помощью уравнения 7:
.(7) |
Где: | d b = задержка управления (с / велосипед) |
|---|---|
| г = эффективное зеленое время для велосипедной полосы (ов) | |
| C = длина сигнального цикла (с) | |
| v b = скорость потока велосипедов на велосипедной дорожке (в одном направлении) (велосипеды / час) | |
| c b = пропускная способность велосипедной полосы (велосипеды / час) |
В таблице 34 указаны критерии LOS для велосипедов на сигнальных перекрестках на основе задержки управления.
Таблица 34. Велосипедные пороги LO на сигнальных перекрестках. (2)
ЛОС | Задержка управления на велосипед (с / велосипед) |
|---|---|
А | ≤ 10 |
Б | > 10-20 |
С | > 20-30 |
D | > 30-40 |
E | > 40-60 |
F | > 60 |
7.1.6 Уровень обслуживания пешеходов
В HCM 2000 (глава 18) LO для пешеходов определяется на основе средней задержки на пешехода (т. Е. Времени ожидания). Задержка для пешеходов рассчитывается с использованием двух параметров: длительности цикла и эффективного зеленого времени для пешеходов. При отсутствии полевых данных HCM 2000 рекомендует оценивать эффективное время зеленого света для пешеходов, взяв интервал ходьбы и добавив 4 секунды из мигающего интервала НЕ ХОДИТЬ, чтобы учесть пешеходов, которые покидают бордюр после начала мигания ДОН Я ХОДУ.Уравнение 8 показывает уравнение для расчета задержки пешехода на основе уравнения 18-5 для HCM 2000 :
(8) |
| Где: | d p = средняя задержка пешехода (с) |
| C = длина цикла (с) | |
| г = эффективное зеленое время для пешеходов |
В таблице 35 указаны пороги LO для пешеходных переходов на сигнальных перекрестках.
Таблица 35. Пороги гетеродинов для пешеходов на сигнальных перекрестках. (2)
ЛОС | Задержка пешехода (сек / пед) | Вероятность несоблюдения |
|---|---|---|
А | <10 | Низкий |
Б | ≥ 10-20 | |
С | > 20-30 | Умеренная |
D | > 30-40 | |
E | > 40-60 | Высокая |
F | > 60 | Очень высокий |
На рисунке 55 показано количество эффективного времени зеленого света, необходимое пешеходам для достижения каждого порогового значения LO на основе указанной продолжительности цикла.Как показано на рисунке, количество зеленого времени, необходимое для пешеходных переходов, чтобы соответствовать стандарту LOS D, увеличивается с увеличением продолжительности цикла. Для продолжительности цикла, превышающей 150 секунд, для поддержания LOS D.
требуется минимальное эффективное зеленое время пешехода 40 секунд.| Примечание: FDW = мигает «НЕ ХОДИТЕ» |
| Рис. 55. LO для пешеходов, основанные на длине цикла и минимальном эффективном зеленом времени пешехода. (2) |
7.2 элемента управления движением
Сигнальные операции пересечения являются функцией трех элементов, описанных в следующих разделах, а также их влияние на операции.
- Объемная характеристика трафика.
- Геометрия проезжей части.
- Время сигнала.
7.2.1 Характеристики объема трафика
Характеристики трафика, используемые в анализе, могут играть решающую роль в определении обработки перекрестков.Чрезмерно консервативное суждение может привести к экономической неэффективности из-за строительства ненужных обработок, в то время как неучет определенных условий (таких как пик рекреационного сезона) может привести к тому, что объекты будут неадекватными и будут испытывать неудовлетворительные условия в определенные периоды года.
Важным элементом разработки соответствующего профиля трафика является различие между спросом на трафик и объемом трафика. Для перекрестка спрос на движение представляет собой схему прибытия транспортных средств, в то время как интенсивность движения обычно измеряется на основе скорости отправления транспортных средств.В случае избыточной пропускной способности или ограниченных ситуаций объем движения может не отражать истинный спрос на перекрестке. В этих случаях пользователь должен разработать профиль спроса. Это может быть достигнуто путем измерения прибывающих транспортных средств до превышения пропускной способности или ограниченного подхода. Разница между прибытием и отъездом отражает потребность в транспортных средствах, которые не обслуживаются светофором. Этот объем необходимо учитывать при анализе транспортных операций.
Объем трафика на перекрестке также может быть меньше потребности в трафике из-за состояния избыточной пропускной способности в восходящем или нисходящем сигнале.Когда это происходит, предприятия, расположенные выше или ниже по течению, «истощают» спрос на пересечении объектов. Этот эффект часто лучше всего учитывать с помощью инструмента анализа микромоделирования.
7.2.2 Геометрия пересечения
Геометрические характеристики перекрестка влияют на объем обслуживания или интенсивность движения, которое перекресток может обработать. Ключевой мерой, используемой для определения подачи на перекресток, является поток насыщения, который аналогичен пропускной способности в том смысле, что он представляет собой количество транспортных средств, пересекающих точку в час; однако о потоке насыщения сообщается, если сигнал светофора горит зеленым весь час.Зная поток насыщения и синхронизацию сигнала для перекрестка, можно вычислить пропускную способность (пропускная способность = поток насыщения, умноженный на отношение времени зеленого света к длине цикла). Интервал насыщения определяется путем измерения среднего промежутка времени между транспортными средствами, которые выходят из очереди в начале зеленого цвета, начиная с четвертого транспортного средства. (2) Интервал насыщения выражается во времени (секундах) на транспортное средство.
Скорость потока насыщения определяется просто делением среднего шага насыщения на количество секунд в час, 3600, для получения единиц транспортных средств в час. HCM 2000 использует идеальную скорость потока насыщения по умолчанию 1900 автомобилей в час. Идеальный поток насыщения предполагает наличие полосы движения шириной 3,6 м (12 футов), только через движение, и отсутствие сопротивления обочине, пешеходов / велосипедистов, уклонов или влияния центрального делового района. HCM 2000 предоставляет поправочные коэффициенты для неидеальных условий для оценки преобладающего расхода насыщения. Скорость потока насыщения может варьироваться в зависимости от времени и места. Скорость потока насыщения колеблется от 1500 до 2000 легковых автомобилей в час на полосу движения. (2) Учитывая вариации, которые существуют в расходах насыщения, по возможности следует собирать местные данные для повышения точности анализа.
Существующая или планируемая геометрия пересечения должна быть оценена, чтобы определить особенности, которые могут повлиять на операции и которые требуют особого рассмотрения.
7.2.3 Синхронизация сигнала
Время сигнала перекрестка также играет важную роль в его эксплуатационных характеристиках. Ключевые факторы включают:
Время действия зеленого .Эффективное зеленое время представляет собой количество полезного времени, доступного для обслуживания движения транспортных средств во время фазы цикла. Он равен отображаемому зеленому времени минус время потери при запуске плюс конечный прирост. Эффективное время зеленого света для каждой фазы обычно определяется на основе доли объема критической полосы для этой фазы по отношению к общему критическому объему перекрестка. Если не будет предоставлено достаточно времени для зеленого света, очереди транспортных средств не смогут очистить перекресток, и возникнут сбои в цикле.Если будет предоставлено слишком много зеленого времени, части цикла не будут использоваться, что приведет к неэффективной работе и разочарованию водителей на смежных подходах.
Межсетевой интервал. Интервал клиренса представляет собой количество времени, необходимое транспортным средствам, чтобы безопасно покинуть перекресток, и включает интервалы смены желтого и красного цвета. Влияние емкости зазора зависит от времени потери.
Время потери. Время потери представляет собой неиспользованную часть фазы транспортного средства. Время потери происходит дважды в течение фазы: в начале, когда автомобили ускоряются из остановленного положения, и в конце, когда автомобили замедляются в ожидании красной индикации. Более продолжительное время простоя сокращает количество доступного эффективного зеленого времени и, таким образом, снижает пропускную способность перекрестка. На широких перекрестках и перекрестках с перекосом подходов или необычной геометрии время потерь обычно больше, чем на обычных перекрестках.
Длина цикла . Длина цикла определяет, как часто в течение часа обслуживается каждое движение. Это либо прямой ввод, в случае заранее заданных или скоординированных сигнальных систем, работающих с общей длиной цикла, либо вывод срабатываний транспортного средства, минимальных и максимальных настроек зеленого цвета и интервалов зазоров. Слишком короткие циклы не обеспечивают достаточного времени ожидания для всех фаз и приводят к сбоям цикла. Более длинные циклы приводят к увеличению задержек и очередей для всех пользователей.
Прогресс . Прогресс — это движение взводов транспортных средств от одного сигнального перекрестка к другому. Хорошо развитая или скоординированная система перемещает взводы транспортных средств так, чтобы они прибывали во время зеленой фазы перекрестка вниз по течению. Когда это происходит, меньше транспортных средств прибывает на красный, а задержки транспортных средств и очереди сводятся к минимуму. плохо скоординированная система перемещает взводы таким образом, что машины прибывают на красный цвет, что увеличивает задержки и очереди для этих перемещений сверх того, что было бы в случае случайного прибытия.
7.3 Практические правила определения размера перекрестка
Это первый уровень анализа. Это единственный уровень, на котором не используются формальные модели или процедуры. Вместо этого он полагается на коллективный опыт прошлой практики. Таким образом, он предлагает лишь очень грубое приближение к окончательному ответу.
Несмотря на очевидные ограничения, этот подход можно использовать для определения размера перекрестка и определения подходящей конфигурации полосы движения. В литературе представлены рекомендации, показанные в таблице 36, для определения геометрии перекрестка на уровне планирования.
Таблица 36. Рекомендации на уровне планирования для определения размера перекрестка.
Геометрические объекты | Комментарий |
|---|---|
Кол-во полос (2) | В качестве общего предложения следует предусмотреть достаточное количество полос проезжей части, чтобы скорость движения по полосе не превышала 450 автомобилей в час. Магистральные объекты, которым выделяется большая часть зеленого времени, могут вместить большие объемы. Другие элементы, которые следует учитывать при определении размеров объекта, включают количество полос движения вверх / вниз по течению, баланс полос движения, элементы конструкции сигналов, влияние пешеходов / велосипедистов, ограничения полосы отвода и последствия для безопасности. |
Эксклюзивные полосы для левого поворота (2) | Решение о выделении полосы с исключительным левым поворотом обычно должно основываться на объеме левостороннего и встречного движения, конструкции перекрестка и последствиях для безопасности.Исключительные полосы с левым поворотом следует исследовать, когда количество автомобилей с левым поворотом превышает 100 автомобилей в час. Двойная полоса с левым поворотом может рассматриваться, когда объем левого поворота превышает 300 автомобилей в час. На некоторых объектах полосы с левым поворотом могут быть желательны во всех местах, независимо от объема. |
Эксклюзивные полосы для правого поворота (2) | Обеспечение полос для правого поворота снижает сопротивление между низкоскоростными транспортными средствами с правым поворотом и более высокоскоростными транспортными средствами с левым поворотом.Разделение правых поворотов также сокращает время, необходимое для проезда зеленого света на проезжей части. Следует учитывать последствия для безопасности пешеходов и велосипедистов. В общем, полосу с поворотом направо на сигнальном перекрестке следует рассматривать, если объем правого поворота и объем смежных полос превышает 300 автомобилей в час. |
Длина левостороннего отсека для хранения (41) | Складские отсеки должны вмещать вдвое больше среднего количества людей, прибывающих влево за цикл. |
7.4 Анализ критических движений
Анализ критического движения (CMA) обычно применяется на этапе планирования; представляет собой наивысший из 4-х уровней моделей эксплуатационных характеристик. За последние 20 лет широко использовались различные версии процедур CMA, в том числе:
Циркуляр Совета по исследованиям транспорта (TRB) 212, (76) , в котором представлены промежуточные материалы по мощности, которые предшествовали выпуску HCM 1985 года. (73)
Метод использования пропускной способности перекрестка (ICU), популярный в некоторых частях Калифорнии.
- Метод планирования HCM, изложенный в версиях HCM 1985, 1994 и 1997 годов. (73,77,78)
- Метод быстрой оценки (QEM), который теперь присутствует в HCM 2000 как уточнение метода планирования, использованного в предыдущих выпусках HCM. (2)
Большинство агентств сочли бы QEM наиболее актуальной и, следовательно, предпочтительной процедурой для проведения анализа критических перемещений; поэтому здесь он будет подробно описан.
Процедуры QEM могут выполняться вручную, хотя программная реализация намного более продуктивна. Сами вычисления несколько сложны, но минимальные требования к полевым данным для конкретного сайта (объемы трафика и количество полос) — вот что ставит QEM в категорию простых процедур. Хотя уровень детализации выходных данных упрощен по сравнению с процедурами более интенсивного анализа данных, QEM предоставляет полезное описание эксплуатационных характеристик, отвечая на следующие вопросы:
Какие критические движения на перекрестке?
Перекресток работает ниже, почти, на уровне или выше пропускной способности?
Где необходимы улучшения мощности?
Рисунок 56. Графическая сводка метода быстрой оценки. |
Шаг 1 — Определите движения, которые должны быть обслужены, и назначьте почасовые объемы трафика на полосу. Это единственные данные для конкретного сайта, которые необходимо предоставить. Часовые объемы трафика обычно корректируются для представления пикового 15-минутного периода.Необходимо знать количество полос для расчета почасовых объемов на полосу.
Шаг 2 -Составьте движения в соответствии с планом фазирования желаемого сигнала. План фазировки основан на обработке каждого левого поворота (защищенный, разрешенный и т. Д.). Если известно, можно использовать реальный левый поворот. В противном случае вероятность необходимости защиты от левого поворота на каждом подходе будет определяться по объему левого поворота и противоположному сквозному объему трафика.
Шаг 3 -Определите критический объем на дорожку, который должен быть размещен на каждой фазе.Каждая фаза обычно включает два неконфликтных движения. Этот шаг определяет, какие движения являются критическими. Критический объем движения определяет количество времени, которое должно быть назначено фазе в каждом сигнальном цикле.
Шаг 4 -Суммируйте критические объемы фаз, чтобы определить общий критический объем, который должен быть размещен на пересечении. Это простой математический шаг, который позволяет оценить, сколько трафика необходимо принять на перекрестке.
Шаг 5 -Определите максимальный критический объем, который может вместить перекресток: это общая пропускная способность перекрестка. HCM QEM предлагает 1,710 полуколебаний в час для большинства целей.
Шаг 6 -Определите критическое отношение объема к пропускной способности, которое вычисляется путем деления общего критического объема на общую пропускную способность перекрестка, после корректировки пропускной способности перекрестка с учетом потери времени из-за запуска и остановки движения в каждом цикле .Потерянное время будет функцией длины цикла и количества защищенных левых поворотов.
Шаг 7 -Определите статус пересечения по критическому соотношению объема к емкости. Пороги статуса приведены в таблице 37.
Таблица 37. Описание пороговых значений отношения V / C для метода быстрой оценки. (2)
Критическое отношение объема к емкости | Оценка |
|---|---|
<0.85 | Перекресток работает с недостаточной пропускной способностью. Чрезмерных задержек не наблюдается. |
0,85–0,95 | Перекресток работает почти на полную мощность. Можно ожидать более высоких задержек, но не должно возникать постоянно увеличивающихся очередей. |
0,95–1,0 | Нестабильный поток приводит к большому диапазону задержки.Вскоре потребуются улучшения на перекрестках, чтобы избежать чрезмерных задержек. |
> 1,0 | Спрос превышает доступную пропускную способность перекрестка. Ожидаются чрезмерные задержки и очереди. |
Понимание критических перемещений и критических объемов сигнального перекрестка является фундаментальным элементом любого анализа пропускной способности. CMA следует проводить для всех перекрестков, рассматриваемых для улучшения пропускной способности.Не следует упускать из виду полезность и эффективность этого шага даже в тех случаях, когда требуются более подробные уровни анализа. Процедура CMA позволяет быстро оценить общую достаточность перекрестка. По этой причине он полезен в качестве инструмента скрининга для быстрой оценки возможности улучшения потенциала и отбрасывания тех, которые явно нежизнеспособны.
Некоторые ограничения процедур Comma в целом и QEM в частности:
Не существует положения для ситуации, когда требования по времени для параллельной фазы движения пешеходов (например, для пересечения широкой улицы) превышают требования по времени для фазы параллельного движения.В результате процедура запятой может недооценивать требования к зеленому времени для конкретной фазы.
Предполагается фиксированное значение общей пропускной способности перекрестка на полосу движения. Коэффициенты корректировки не предусмотрены для учета различных условий на разных площадках, и нет положений об использовании полевых данных для отмены фиксированного предположения.
Сложные схемы фазирования, такие как запаздывающие фазы левого поворота, перекрытие правого поворота с движением левого поворота, эксклюзивные пешеходные фазы, интервалы движения вперед / назад пешеходов и т. Д., не считаются. Существенные эксплуатационные преимущества и / или преимущества в области безопасности иногда могут быть достигнуты за счет использования комплексного фазирования.
Время потери не учитывается напрямую в процедурах запятой. Следовательно, эффект более длительных интервалов замены и зазоров не может быть напрямую компенсирован этой процедурой.
Синтезированный план работы для сигнала не принимает во внимание минимальное время зеленого света, и, следовательно, не может быть легко реализован как часть проекта перекрестка.HCM особо предостерегает от использования QEM для проектирования синхронизации сигналов.
Показатели производительности (например, задержка управления, LOS и возврат в очередь) не предусмотрены.
7.5 Операционная процедура HCM для сигнальных перекрестков
Для многих приложений требуются такие показатели производительности, как задержка транспортного средства, LOS и очереди.Эти меры не сообщаются в процедурах запятой, но предоставляются процедурами макроскопического уровня, такими как методология оперативного анализа HCM для сигнальных перекрестков. Эта процедура представлена как второй уровень анализа на рисунке 54. Анализ на макроскопическом уровне дает результаты по нескольким длительностям цикла на основе почасовой потребности в транспортных средствах и ставок обслуживания. Анализ HCM обычно выполняется в течение 15-минутных периодов, чтобы учесть самую тяжелую часть часа пик.
Процедуры анализа HCM предоставляют оценки потока насыщения, пропускной способности, задержки, LOS и задержки очереди по группам полос для каждого подхода.Эксклюзивные полосы движения рассматриваются как отдельные группы полос. Дорожки с общими движениями считаются одной группой полос. Результаты группы полос могут быть агрегированы для оценки средней задержки управления для каждого транспортного средства на уровне перекрестка.
Повышенная детализация вывода по сравнению с процедурой Comma достигается за счет дополнительных требований к входным данным. Должно быть предоставлено полное описание геометрии перекрестка и рабочих параметров. Несколько факторов, влияющих на скорость потока насыщения (например,г., ширина полосы движения, уклон, парковка, пешеходы) необходимо указать. Полный план работы с сигналом, включая фазировку, длину цикла и время ожидания, должен быть разработан внешними организациями. Как показано на фиг. 54, начальный план работы с сигналом может быть получен из QEM, или более подробный и реализуемый план может быть создан с использованием временной модели сигнала, которая представляет следующий уровень анализа. Существующую синхронизацию сигнала также можно получить в полевых условиях.
В дополнение к сигнальной процедуре перекрестка, HCM также включает процедуры для оценки LOS для велосипедистов, пешеходов и пользователей общественного транспорта на сигнальных перекрестках.Это уже обсуждалось ранее в этой главе.
Известные ограничения процедур анализа HCM для сигнализируемых перекрестков существуют при следующих условиях:
Доступные программные продукты, выполняющие анализ HCM, обычно не учитывают пересечения более чем четырех подходов.
Анализ может не подходить для альтернативных схем пересечения.
Влияние очередей, превышающих доступную длину отсека хранения, не рассматривается достаточно подробно, равно как и резервное копирование очередей, которые блокируют стоп-линию в течение некоторого периода зеленого времени.
Подъездные пути, расположенные в зоне влияния сигнальных перекрестков, не распознаются.
Эффект артериальной прогрессии в скоординированных системах признается, но только в грубом приближении.
Неоднородные эффекты на отдельных полосах движения внутри групп многополосных полос (например, конус вниз по потоку, съезд на автомагистраль, подъездные пути) не распознаются.
Если существует какое-либо из этих условий, может потребоваться перейти к следующему уровню анализа.
7.6 Модели синхронизации артериальных и сетевых сигналов
Как и в случае с процедурами HCM, временные модели артериальных и сетевых сигналов также макроскопичны по своей природе. Однако они имеют дело с более высоким уровнем детализации и больше ориентированы на операционное проектирование, чем HCM. Эффект увеличения трафика между перекрестками рассматривается явно либо как простая пространственно-временная диаграмма, либо как более сложное явление распространения взводов. Кроме того, эти модели могут в явном виде учитывать движения пешеходов на перекрестках и их влияние на время перехода в режим зеленого света для затронутых фаз.
Эти модели пытаются оптимизировать некоторые аспекты производительности системы как часть процесса проектирования. Двумя наиболее распространенными критериями оптимизации являются качество движения, воспринимаемое водителем, и общая производительность системы с использованием таких показателей, как остановки, задержка и расход топлива. Как показано на рисунке 54, оптимизированный план синхронизации сигналов может быть передан обратно в анализ HCM или передан на следующий уровень анализа, который включает микроскопическое моделирование.
Хотя модели синхронизации сигналов во многих отношениях более детализированы, чем процедуры HCM, они менее детализированы, когда дело доходит до определения скорости потока насыщения.HCM обеспечивает вычислительную структуру для определения расходов насыщения как функции геометрических и рабочих параметров. С другой стороны, скорости потока насыщения обычно обрабатываются моделями синхронизации сигнала как входные данные. Передача данных о скорости потока насыщения между HCM и моделями синхронизации сигнала поэтому показана на рисунке 54 как часть потока данных между различными уровнями анализа.
Дополнительные детали, присутствующие в моделях синхронизации сигналов, преодолевают многие ограничения HCM для целей оперативного анализа сигнальных перекрестков.Обычно нет необходимости переходить к окончательному уровню анализа, который включает микроскопическое моделирование, если только между движениями не происходят сложные взаимодействия или дополнительные выходные данные, такие как анимированная графика, не считаются желательными.
7.7 Моделирование под микроскопом
В случаях, когда желательны отдельные циклы и / или отдельные операции с транспортным средством, следует рассмотреть возможность анализа на микроскопическом уровне, чтобы дополнить совокупные результаты, полученные на менее подробных уровнях анализа.Микроскопический анализ выполняется с использованием одного или нескольких программных продуктов для моделирования. Инструменты анализа микромоделирования основаны на наборе правил, используемых для распространения положения транспортных средств от одной секунды к другой. Такие правила, как следование за автомобилем, уступка, реакция на сигналы и т. Д., Являются неотъемлемой частью каждого программного пакета моделирования. Правила обычно имеют стохастический характер, другими словами, с каждым аспектом операции связана случайная изменчивость. Некоторые инструменты моделирования создают анимированные графические выходные данные, чтобы проиллюстрировать рабочие условия для каждого транспортного средства и посекундно в течение заданного периода времени.Некоторые имитационные модели могут явным образом моделировать пешеходов, позволяя аналитику изучать влияние импеданса транспортных средств на пешеходов и наоборот. Однако возможности моделирования пешеходов в большинстве программ моделирования довольно упрощены и не охватывают весь спектр активности и способностей пешеходов.
Микроскопические модели номинально дают те же показатели эффективности, что и их макроскопические аналоги, хотя существуют незначительные различия в определении некоторых показателей.Меры по сбросу загрязняющих веществ обычно включаются в результаты микроскопии. Интересно, что одна из наиболее важных мер, емкость, заметно отсутствует в результатах моделирования, потому что природа имитационных моделей не поддается вычислению емкости
Инструменты микроскопического моделирования могут быть особенно эффективными в случаях, когда перекрестки расположены в пределах зоны влияния соседних сигнализируемых перекрестков и на них влияют операции вверх и / или вниз по течению.Кроме того, выходные данные графического моделирования могут потребоваться для проверки полевых наблюдений и / или обеспечения визуального описания транспортных операций для аудитории. Инструменты микроскопического моделирования также могут использоваться для определения продолжительности времени, в течение которого возникает состояние, и могут учитывать эффекты емкости и задержки, связанные с известными общесистемными схемами перемещения.
Уровень усилий, связанных с разработкой сети микроскопического моделирования, значительно больше, чем при макроскопическом анализе, и намного больше, чем при анализе критического движения.Как и операционная процедура HCM, инструменты микроскопического моделирования требуют полностью определенного плана синхронизации сигналов, который должен быть сгенерирован извне. Однако, в отличие от HCM, для получения достоверных результатов необходима обширная калибровка с использованием полевых данных. По этой причине решение о том, следует ли использовать инструмент микроскопического моделирования, следует принимать в каждом конкретном случае с учетом ресурсов, доступных для приобретения программного обеспечения и для сбора необходимых данных для калибровки модели на изучаемом перекрестке. .
Часть III включает описание обработок, которые могут применяться к сигнальным перекресткам для уменьшения эксплуатационных недостатков и / или недостатков безопасности. Процедуры организованы следующим образом: общесистемные обработки (глава 8), общесистемные обработки (глава 9), альтернативные методы лечения пересечений (глава 10), подходы лечения (глава 11) и индивидуальные двигательные процедуры (глава 12). Предполагается, что до того, как читатели начнут изучать методы лечения в части III, они уже ознакомятся с фундаментальными элементами, описанными в части i, а также с процессом проекта и методами анализа, описанными в части II.
Предыдущий | Содержание | Следующая
Метод оптимизации скоординированного управления сигналом перекрестка на основе модели с приводом от транспортного средства
Традиционное синхронизирующее управление зеленой волной с заранее определенным циклом, разделением и смещением не может адаптироваться для динамического потока трафика в реальном времени. В этом документе предлагается метод скоординированного управления для оптимизации полосы пропускания зеленой волны с переменным временем цикла, интегрированный с управлением, управляемым трафиком.При скоординированном контроле зеленое разделение оптимизируется в режиме реального времени за счет измеренного присутствия прибывающих и / или стоящих транспортных средств на каждом перекрестке, и одновременно гарантируются зеленые волны вдоль магистралей. В частности, сначала определяется динамическая граница зеленой волны, а затем представлены алгоритмы зеленого раннего старта и зеленого позднего старта соответственно, чтобы учесть колебания скорости прибытия транспортных средств на каждой фазе. Численные примеры показывают, что предлагаемый метод улучшает время зеленого сигнала, расширяет полосу пропускания зеленой волны и сокращает очереди.
1. Введение
Управление движением — это один из режимов управления сигналами дорожного движения [1], который не имеет заранее установленного цикла, последовательности сигналов и индикаторов зеленого цвета и может соответственно адаптироваться к объему транспортных средств на дороге. Однако из-за переменного цикла и случайного включения света его практически сложно применять на городских дорогах, особенно в рамках скоординированного управления. В настоящее время в большинстве городов в системе светофоров все еще преобладает многопериодный фиксированный цикл управления, часто интегрированный с контролем зеленой волны на городских магистралях.Управление зеленой волной обычно пытается максимизировать общественную полосу пропускания зеленой волны, в которой несколько светофоров (обычно три или более) скоординированы, чтобы обеспечить непрерывный транспортный поток через несколько перекрестков в одном основном направлении. Управление зеленой волной широко используется в управлении сигналами из-за своей простоты и эффективности [2], которое в основном включает графический метод [3], численный метод [4] и закон Максбанда [5].
В большинстве моделей оптимизации зеленой волны цикл, разделение и смещение, как правило, предопределены и не могут адаптироваться к колебаниям трафика в реальном времени, что, вероятно, снижает эффективность управления координацией.Таким образом, в этой статье предлагается метод скоординированного управления для оптимизации полосы пропускания зеленой волны с переменным временем цикла, интегрированный с управлением, управляемым движением. Основная цель этого документа — обеспечить пропускную способность для координации в реальном времени за счет использования зеленого времени и приведения в действие прибывающих или стоящих транспортных средств на каждом перекрестке. Кроме того, представлен численный пример для уточнения нашего метода.
2. Ключевые параметры в управлении трафиком
В отличие от управления сигналом трафика с фиксированным циклом, управление по трафику не имеет фиксированной длины цикла, а также зеленого разделения, которое зависит от объема трафика в реальном времени.В управлении, управляемом движением, как показано на Рисунке 1, процесс фазового перехода регулируется следующими правилами перехода: (i) когда заданное минимальное время зеленого света от начального зеленого света заканчивается, фаза изменяется, если нет транспортного средства. вход в фазу; (ii) в противном случае фаза не изменится до тех пор, пока зеленое время не будет продлено до предварительно установленного максимального зеленого времени или времени, когда в фазу не въезжают никакие транспортные средства. Фазовый переход может эффективно уменьшить задержки и остановки транспортных средств и повысить эффективность сигнализируемых перекрестков, если максимальное время зеленого и единичное время задержки разумно заранее определены.
2.1. Минимальное время зеленого цвета
Минимальное время зеленого цвета представляет собой наименьшее количество времени, в течение которого зеленый сигнал будет отображаться при движении. Продолжительность минимального зеленого цвета используется для того, чтобы водители могли реагировать на начало зеленого интервала и соответствовать ожиданиям водителя и времени пешеходного перехода, когда отдельные индикаторы пешеходных сигналов не предусмотрены. На продолжительность минимального зеленого цвета также может влиять расположение детектора. Существуют различные методы расчета минимального зеленого времени, которые могут зависеть от типа системы управления и расположения детектора [6].В нашей системе управления движением извещатели располагаются на расстоянии от 2 до 20 метров перед стоп-линиями.
Минимальное время зеленого света рассчитывается следующим образом:
Оптимальные методы систем управления движением для пешеходов, пересекающих сигнальный перекресток под городскими путепроводами
[1] Валлион, Крис.Сокращение задержек пешеходов на светофоре [J]. 32-й Австралазийский форум транспортных исследований.
[2] Ким, Хо Гён. Влияние факторов, связанных с пешеходами, на эффективность перекрестка [J].Отчет о транспортных исследованиях, 2005 г., №1920: стр. 65-73.
DOI: 10.3141 / 1920-08
[3] Абди, Зишан Р.Аналитический метод оценки влияния приоритета транзитного сигнала на задержку транспортного средства [J]. Журнал транспортного машиностроения, 2011 г., 137 (8): стр. 589-600.
DOI: 10.1061 / (asce) te.1943-5436.0000242
[4] Чжан, Хуйлин.Анализ модели задержки транспортного средства комплексным методом [C]. ICTE 2009, т. 345, стр. 705-710.
[5] ФЭНЬ, ШУМИН. Анализ задержки транспортных средств на участках дороги по состоянию пешеходного перехода [J].Журнал инженерии транспортных систем и информационных технологий, 2007, 7 (3): стр.73-77.
DOI: 10.1016 / s1570-6672 (07) 60023-3
Солнечная беспроводная система управления движением / сигнал движения на перекрестке / контроллер светофора
Солнечная беспроводная система управления движением / Сигнал перекрестка / Контроллер светофора
Подробная информация о продукте
Желтая предупреждающая лампа на солнечной батарее
Корпус Meterial | ПК и металлический обод | ||||||||||||||||||||||||||||||||||||||
Солнечная панель из поликристаллического кремния 18 В, 10 Вт, срок службы батареи ≥15 лет | |||||||||||||||||||||||||||||||||||||||
Батарея | Коллоидная батарея 12 В, 7 Ач и необслуживаемая батарея DIN | ||||||||||||||||||||||||||||||||||||||
Количество светодиодов 914
Преимущество: 1.Простая установка. Нет необходимости во внешнем питании, без проводки. 2. Энергосбережение. Маломощный, солнечный элемент, низкая стоимость 3. Экологичность. Без вредных веществ, без загрязняющих веществ. 4. Прочный и долговечный. ПК и алюминиевая крышка, ударопрочность, защита от старения, коррозия 5. Стабильная производительность. Используйте одиночный корабль America ATMEL для защиты цепи 6. Длительный срок службы. Светодиод ≥100000 часов, солнечная батарея ≥15 лет 7. Длительное рабочее время. После полной зарядки может работать более 120 часов или 6 дождливых дней 8.Хорошая видимость. Профессиональный светоотражающий свет, соответствующий дизайну светодиодов. Работа и безопасность на перекресткахПерекрестки — это конфликтные точки на всех дорожных системах. Сюда входят автомагистрали США и штата, окружные дороги и местные улицы. Все виды транспорта пересекаются при движении или повороте с одного маршрута на другой. Когда разные пути разделяются, пересекаются или соединяются, они известны как точки конфликта, и они всегда присутствуют на пересечениях. Ограничение количества конфликтных точек на перекрестке не только снижает частоту и серьезность аварий, но также улучшает общую работу и мобильность. Пожалуйста, просмотрите бюллетень ICE 20-05 для описания изменений в руководстве 2021 года. Руководство по оценке контроля за перекрестками В 2015 году Флорида заняла первое место в стране с наибольшим количеством несчастных случаев со смертельным исходом на перекрестках. Учитывая, что более 30 процентов всех погибших в ДТП происходит в результате ДТП, связанных с перекрестками, Стратегический план обеспечения безопасности автомобильных дорог Флориды (SHSP) определяет безопасность перекрестков как одно из приоритетных направлений для штата.В ответ на этот призыв к действию и под руководством руководства FDOT разработала руководство по оценке контроля перекрестков (ICE), чтобы помочь в этой работе. Процесс ICE количественно оценивает несколько сценариев (альтернатив) контроля перекрестков и ранжирует эти альтернативы на основе их эксплуатационных характеристик и показателей безопасности. Внедрение процедуры, основанной на характеристиках, такой как ICE, создает прозрачный и последовательный подход к рассмотрению альтернатив перекрестков на основе таких показателей, как безопасность, эксплуатация, стоимость, а также социальные, экологические и экономические последствия. ICE Forms
Шаблоны синхронизации по умолчанию для альтернативных типов перекрестков: (97,7 КБ)
Объем услуг и оценка рабочего времени персонала
Back to Top
| |||||||||||||||||||||||||||||||||||||||